 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDUGMA: Dynamic Uncertainty-Based Gaussian Mixture Alignment
Paper and Code
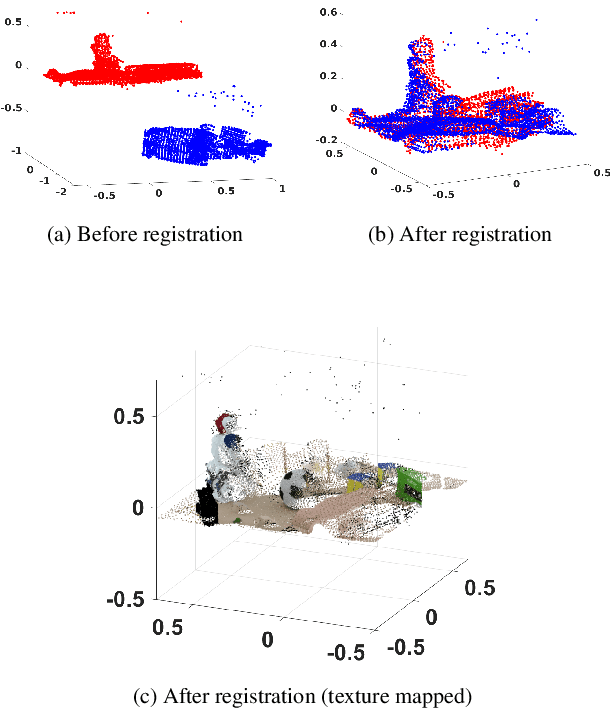

Registering accurately point clouds from a cheap low-resolution sensor is a challenging task. Existing rigid registration methods failed to use the physical 3D uncertainty distribution of each point from a real sensor in the dynamic alignment process mainly because the uncertainty model for a point is static and invariant and it is hard to describe the change of these physical uncertainty models in the registration process. Additionally, the existing Gaussian mixture alignment architecture cannot be efficiently implement these dynamic changes. This paper proposes a simple architecture combining error estimation from sample covariances and dual dynamic global probability alignment using the convolution of uncertainty-based Gaussian Mixture Models (GMM) from point clouds. Firstly, we propose an efficient way to describe the change of each 3D uncertainty model, which represents the structure of the point cloud much better. Unlike the invariant GMM (representing a fixed point cloud) in traditional Gaussian mixture alignment, we use two uncertainty-based GMMs that change and interact with each other in each iteration. In order to have a wider basin of convergence than other local algorithms, we design a more robust energy function by convolving efficiently the two GMMs over the whole 3D space. Tens of thousands of trials have been conducted on hundreds of models from multiple datasets to demonstrate the proposed method's superior performance compared with the current state-of-the-art methods. The new dataset and code is available from https://github.com/Canpu999