 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving Style Analysis Using Primitive Driving Patterns With Bayesian Nonparametric Approaches
Paper and Code
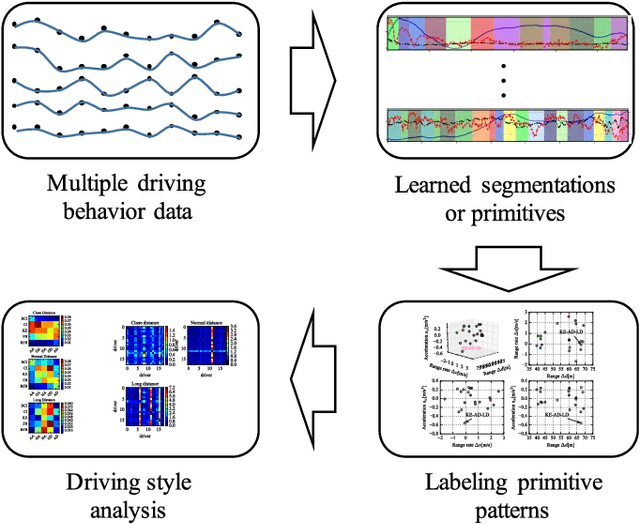
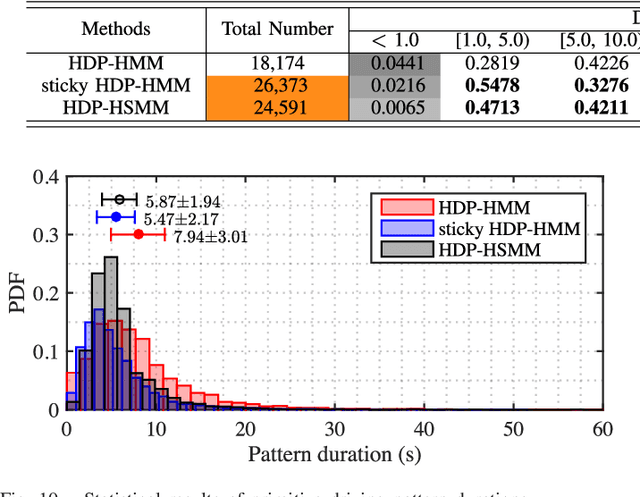
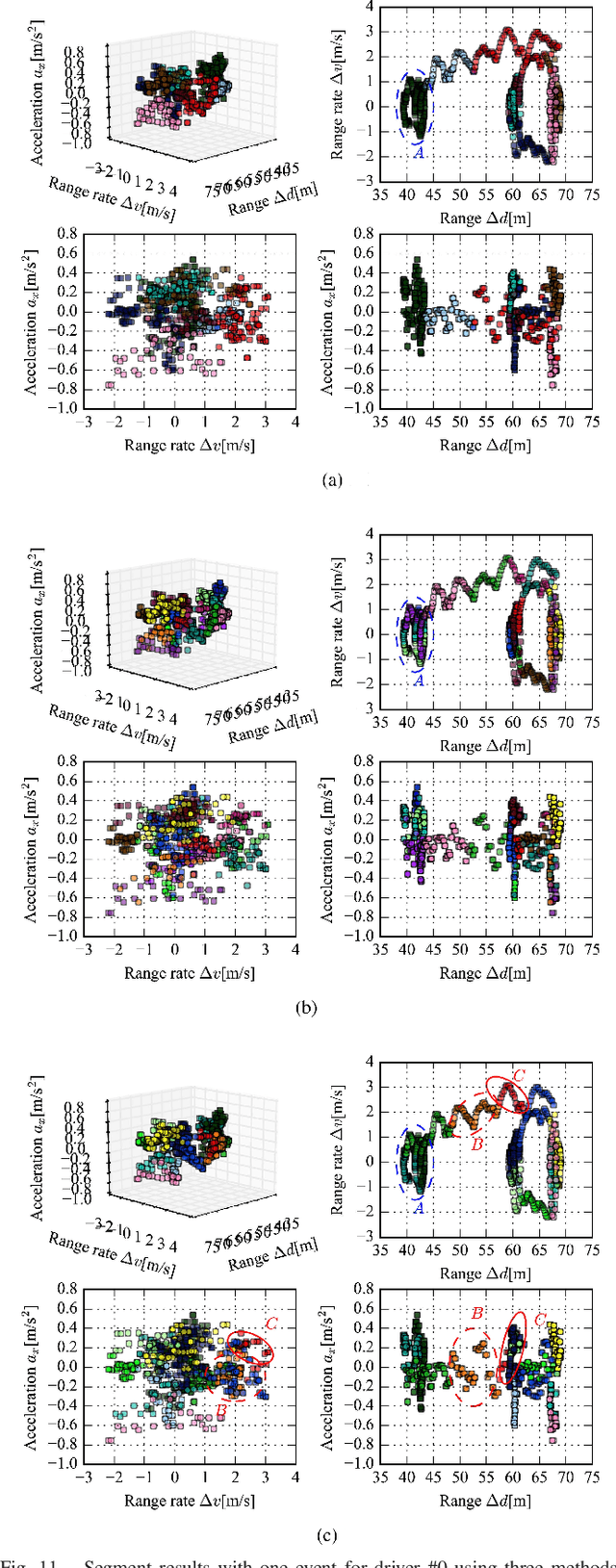
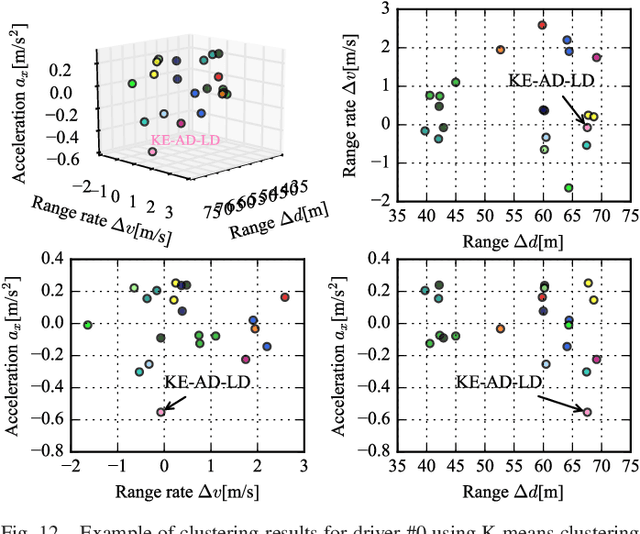
Analysis and recognition of driving styles are profoundly important to intelligent transportation and vehicle calibration. This paper presents a novel driving style analysis framework using the primitive driving patterns learned from naturalistic driving data. In order to achieve this, first, a Bayesian nonparametric learning method based on a hidden semi-Markov model (HSMM) is introduced to extract primitive driving patterns from time series driving data without prior knowledge of the number of these patterns. In the Bayesian nonparametric approach, we utilize a hierarchical Dirichlet process (HDP) instead of learning the unknown number of smooth dynamical modes of HSMM, thus generating the primitive driving patterns. Each primitive pattern is clustered and then labeled using behavioral semantics according to drivers' physical and psychological perception thresholds. For each driver, 75 primitive driving patterns in car-following scenarios are learned and semantically labeled. In order to show the HDP-HSMM's utility to learn primitive driving patterns, other two Bayesian nonparametric approaches, HDP-HMM and sticky HDP-HMM, are compared. The naturalistic driving data of 18 drivers were collected from the University of Michigan Safety Pilot Model Deployment (SPDM) database. The individual driving styles are discussed according to distribution characteristics of the learned primitive driving patterns and also the difference in driving styles among drivers are evaluated using the Kullback-Leibler divergence. The experiment results demonstrate that the proposed primitive pattern-based method can allow one to semantically understand driver behaviors and driving styles.