 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstraint-Aware Diffusion Guidance for Robotics: Real-Time Obstacle Avoidance for Autonomous Racing
Paper and Code
May 19, 2025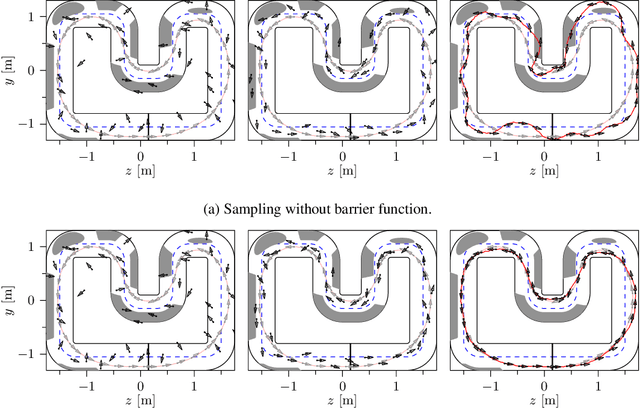

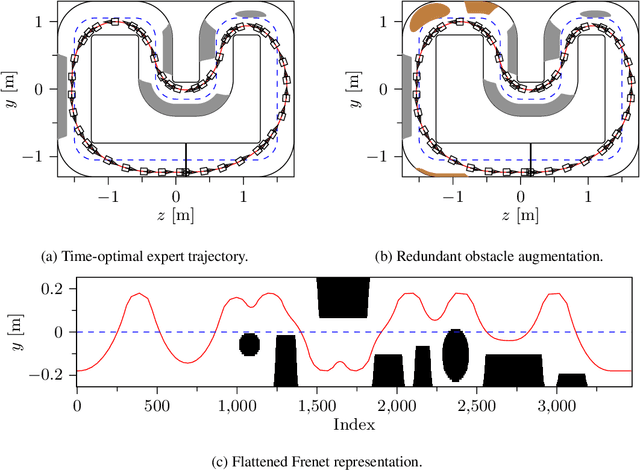
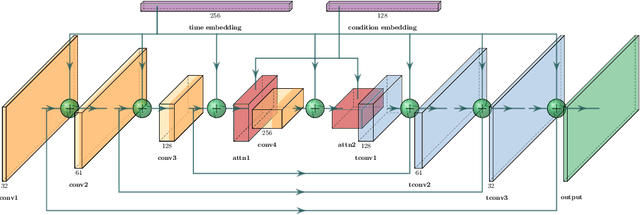
Diffusion models hold great potential in robotics due to their ability to capture complex, high-dimensional data distributions. However, their lack of constraint-awareness limits their deployment in safety-critical applications. We propose Constraint-Aware Diffusion Guidance (CoDiG), a data-efficient and general-purpose framework that integrates barrier functions into the denoising process, guiding diffusion sampling toward constraint-satisfying outputs. CoDiG enables constraint satisfaction even with limited training data and generalizes across tasks. We evaluate our framework in the challenging setting of miniature autonomous racing, where real-time obstacle avoidance is essential. Real-world experiments show that CoDiG generates safe outputs efficiently under dynamic conditions, highlighting its potential for broader robotic applications. A demonstration video is available at https://youtu.be/KNYsTdtdxOU.