 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient and Robust Object-Level Cooperative Perception Framework for Connected and Automated Driving
Paper and Code
Oct 12, 2022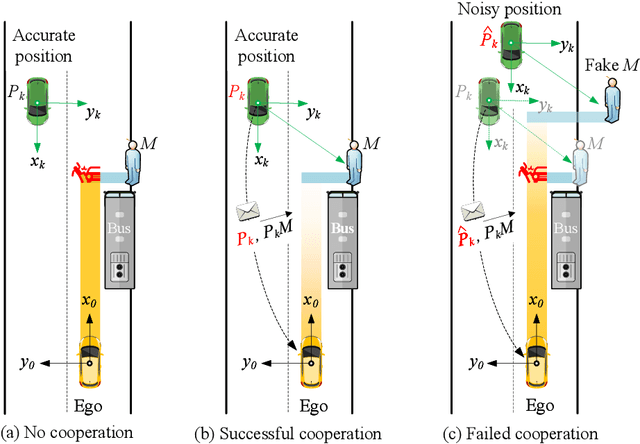
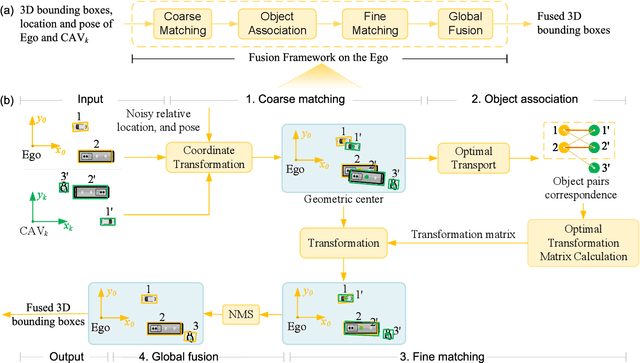
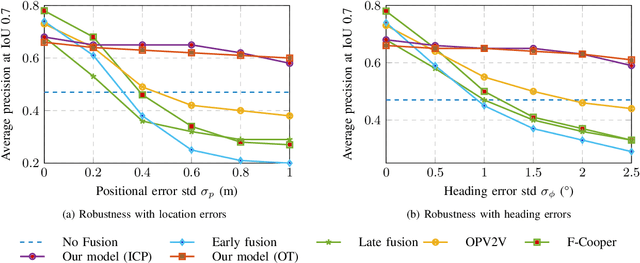
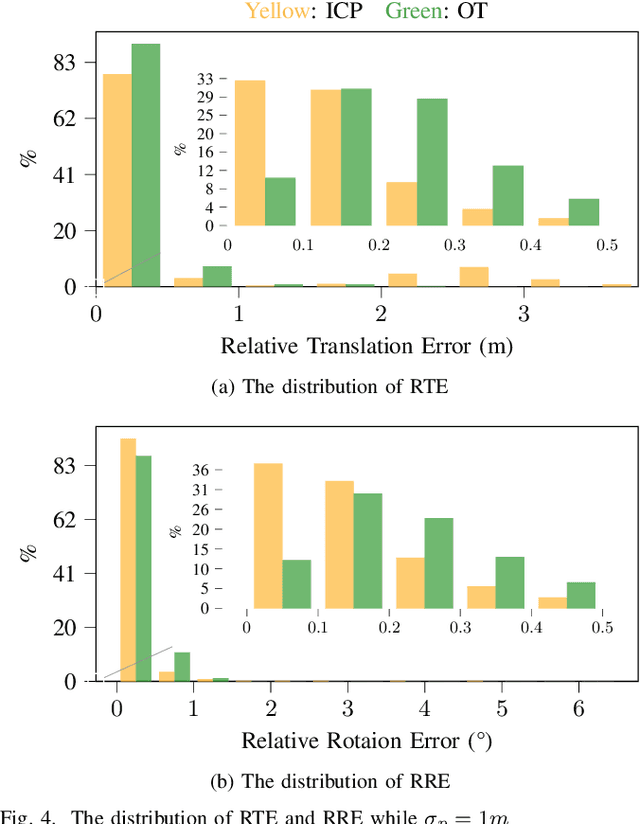
Cooperative perception is challenging for connected and automated driving because of the real-time requirements and bandwidth limitation, especially when the vehicle location and pose information are inaccurate. We propose an efficient object-level cooperative perception framework, in which data of the 3D bounding boxes, location, and pose are broadcast and received between the connected vehicles, then fused at the object level. Two Iterative Closest Point (ICP) and Optimal Transport theory-based matching algorithms are developed to maximize the total correlations between the 3D bounding boxes jointly detected by the vehicles. Experiment results show that it only takes 5ms to associate objects from different vehicles for each frame, and robust performance is achieved for different levels of location and heading errors. Meanwhile, the proposed framework outperforms the state-of-the-art benchmark methods when location or pose errors occur.