 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Prior Policy Guidance for Motion Planning of Dual-Arm Free-Floating Space Robot
Paper and Code
Sep 03, 2022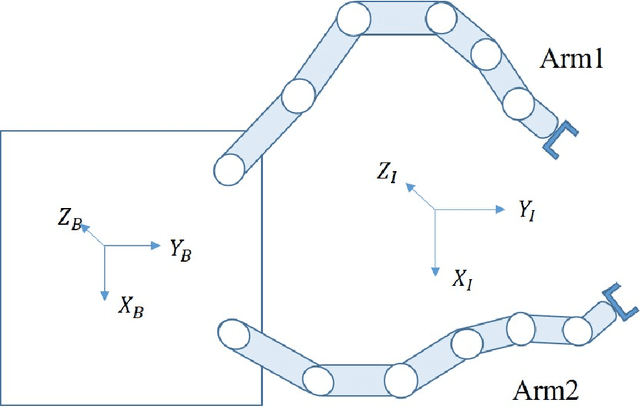
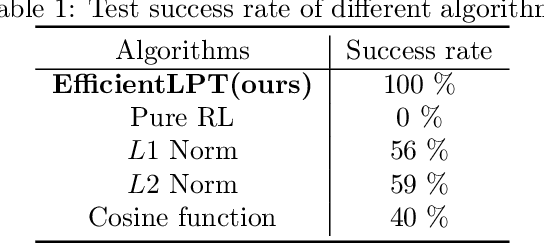
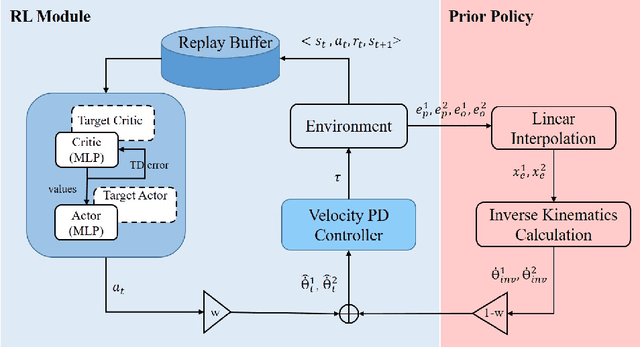
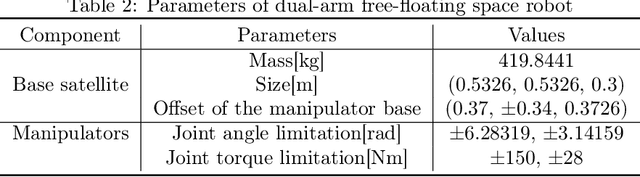
Reinforcement learning methods as a promising technique have achieved superior results in the motion planning of free-floating space robots. However, due to the increase in planning dimension and the intensification of system dynamics coupling, the motion planning of dual-arm free-floating space robots remains an open challenge. In particular, the current study cannot handle the task of capturing a non-cooperative object due to the lack of the pose constraint of the end-effectors. To address the problem, we propose a novel algorithm, EfficientLPT, to facilitate RL-based methods to improve planning accuracy efficiently. Our core contributions are constructing a mixed policy with prior knowledge guidance and introducing infinite norm to build a more reasonable reward function. Furthermore, our method successfully captures a rotating object with different spinning speeds.