 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Position and Orientation Planning of Nonholonomic Multi-Robot Systems: A Dynamic Vector Field Approach
Paper and Code
Sep 02, 2022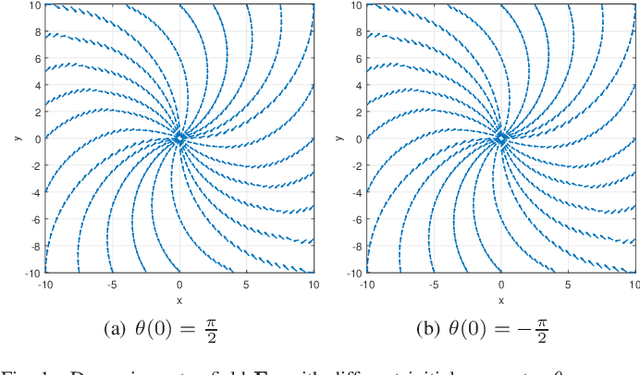
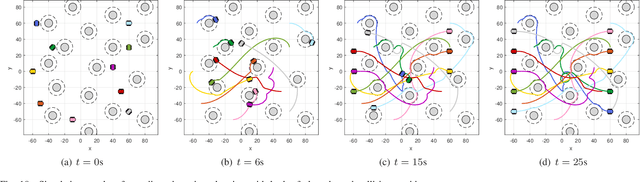
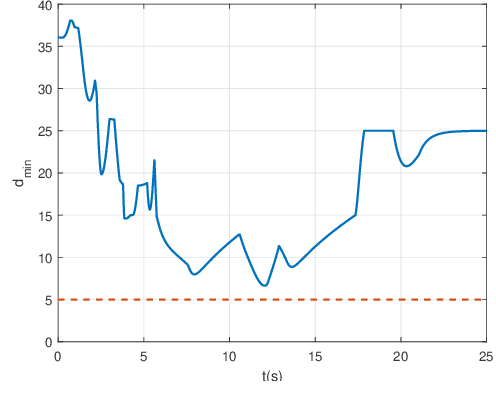
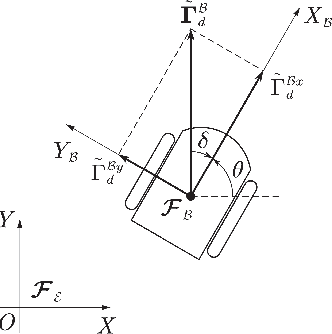
This paper considers the simultaneous position and orientation planning of nonholonomic multirobot systems. Different from common researches which only focus on final position constraints, we model the nonholonomic mobile robot as a rigid body and introduce the orientation as well as position constraints for the robot's final states. In other words, robots should not only reach the specified positions, but also point to the desired orientations simultaneously. The challenge of this problem lies in the underactuation of full-state motion planning, since three states need to be planned by mere two control inputs. To this end, we propose a dynamic vector field (DVF) based on the rigid body modeling. Specifically, the dynamics of the robot orientation are brought into the vector field, implying that the vector field is not static on the 2-D plane anymore, but a dynamic one varying with the attitude angle. Hence, each robot can move along the integral curve of the DVF to arrive at the desired position, and in the meantime, the attitude angle can converge to the specified value following the orientation dynamics. Subsequently, by designing a circular vector field under the framework of the DVF, we further study the obstacle avoidance and mutual-robot-collision avoidance in the motion planning. Finally, numerical simulation examples are provided to verify the effectiveness of the proposed methodology.