 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Optimization-based Nonlinear Adaptive PID Controller Design for Robust Mobile Manipulation
Paper and Code
Jul 04, 2022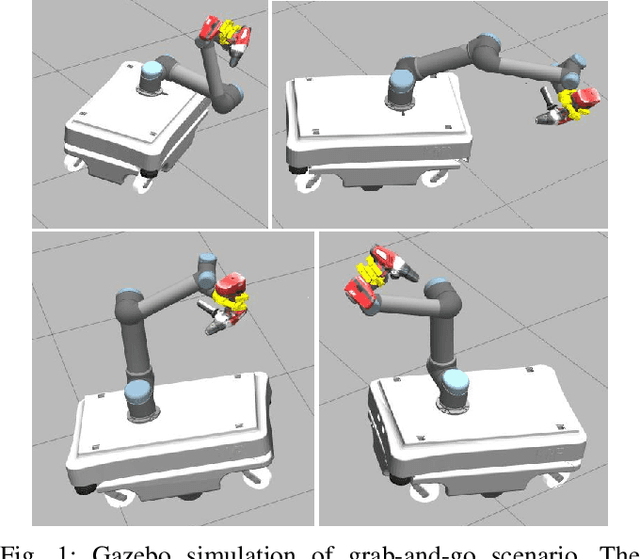
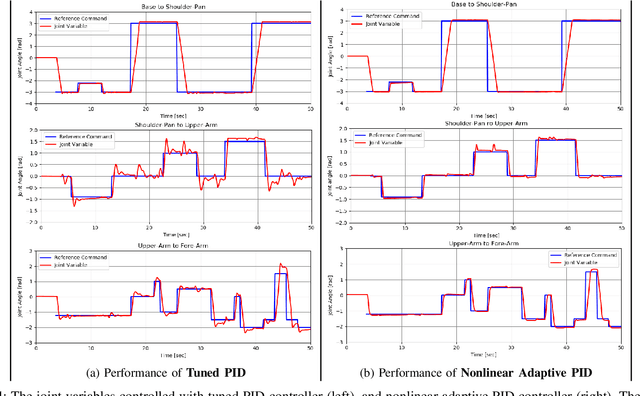
In this paper, we propose to use a nonlinear adaptive PID controller to regulate the joint variables of a mobile manipulator. The motion of the mobile base forces undue disturbances on the joint controllers of the manipulator. In designing a conventional PID controller, one should make a trade-off between the performance and agility of the closed-loop system and its stability margins. The proposed nonlinear adaptive PID controller provides a mechanism to relax the need for such a compromise by adapting the gains according to the magnitude of the error without expert tuning. Therefore, we can achieve agile performance for the system while seeing damped overshoot in the output and track the reference as close as possible, even in the presence of external disturbances and uncertainties in the modeling of the system. We have employed a Bayesian optimization approach to choose the parameters of a nonlinear adaptive PID controller to achieve the best performance in tracking the reference input and rejecting disturbances. The results demonstrate that a well-designed nonlinear adaptive PID controller can effectively regulate a mobile manipulator's joint variables while carrying an unspecified heavy load and an abrupt base movement occurs.