 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Obstacle Avoidance Algorithm Based on Trajectory Learning
Paper and Code
Jun 07, 2022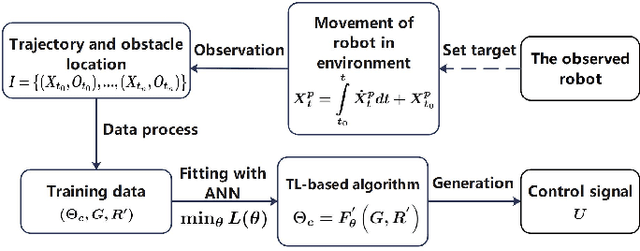

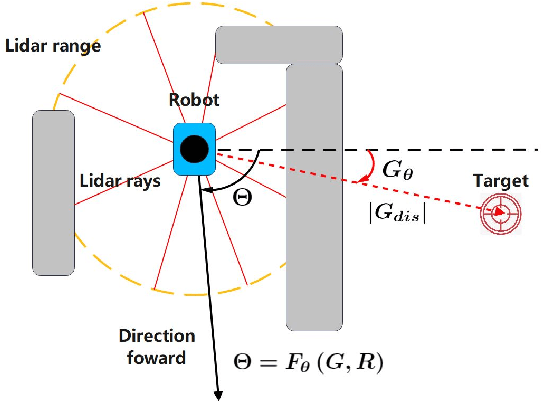
Most obstacle avoidance algorithms are only effective in specific environments, and they have low adaptability to some new environments. In this paper, we propose a trajectory learning (TL)-based obstacle avoidance algorithm, which can learn implicit obstacle avoidance mechanism from trajectories generated by general obstacle avoidance algorithms and achieves better adaptability. Specifically, we define a general data structure to describe the obstacle avoidance mechanism. Based on this structure, we transform the learning of the obstacle avoidance algorithm into a multiclass classification problem about the direction selection. Then, we design an artificial neural network (ANN) to fit multiclass classification function through supervised learning and finally obtain the obstacle avoidance mechanism that generates the observed trajectories. Our algorithm can obtain the obstacle avoidance mechanism similar to that demonstrated in the trajectories, and are adaptable to unseen environments. The automatic learning mechanism simplifies modification and debugging of obstacle avoidance algorithms in applications. Simulation results demonstrate that the proposed algorithm can learn obstacle avoidance strategy from trajectories and achieve better adaptability.