 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModels of human preference for learning reward functions
Paper and Code
Jun 05, 2022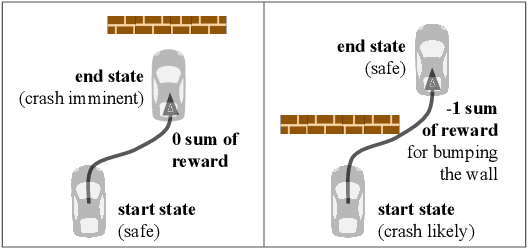
The utility of reinforcement learning is limited by the alignment of reward functions with the interests of human stakeholders. One promising method for alignment is to learn the reward function from human-generated preferences between pairs of trajectory segments. These human preferences are typically assumed to be informed solely by partial return, the sum of rewards along each segment. We find this assumption to be flawed and propose modeling preferences instead as arising from a different statistic: each segment's regret, a measure of a segment's deviation from optimal decision-making. Given infinitely many preferences generated according to regret, we prove that we can identify a reward function equivalent to the reward function that generated those preferences. We also prove that the previous partial return model lacks this identifiability property without preference noise that reveals rewards' relative proportions, and we empirically show that our proposed regret preference model outperforms it with finite training data in otherwise the same setting. Additionally, our proposed regret preference model better predicts real human preferences and also learns reward functions from these preferences that lead to policies that are better human-aligned. Overall, this work establishes that the choice of preference model is impactful, and our proposed regret preference model provides an improvement upon a core assumption of recent research.