 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformable Multi-Objective and Multi-Directional RRT* System for Robot Path Planning
Paper and Code
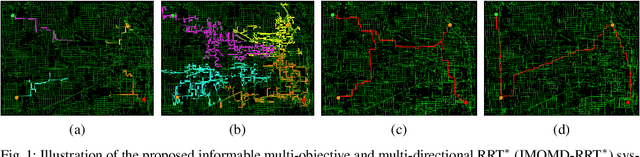
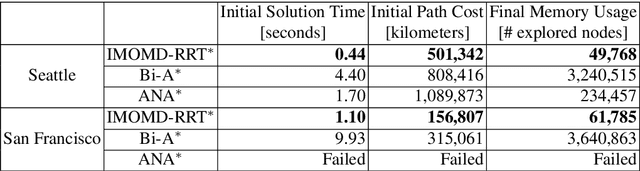
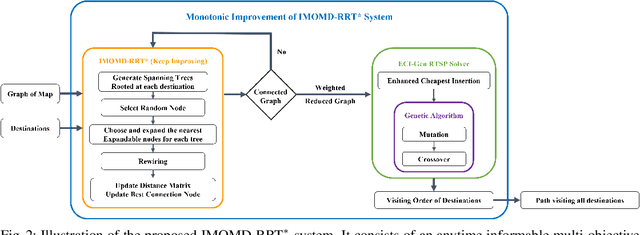
Multi-objective or multi-destination path planning is crucial for mobile robotics applications such as mobility as a service, robotics inspection, and electric vehicle charging for long trips. This work proposes an anytime iterative system to concurrently solve the multi-objective path planning problem and determine the visiting order of destinations. The system is comprised of an anytime informable multi-objective and multi-directional RRT* algorithm to form a simple connected graph, and a proposed solver that consists of an enhanced cheapest insertion algorithm and a genetic algorithm to solve the relaxed traveling salesman problem in polynomial time. Moreover, a list of waypoints is often provided for robotics inspection and vehicle routing so that the robot can preferentially visit certain equipment or areas of interest. We show that the proposed system can inherently incorporate such knowledge, and can navigate through challenging topology. The proposed anytime system is evaluated on large and complex graphs built for real-world driving applications. All implementations are coded in multi-threaded C++ and are available at: https://github.com/UMich-BipedLab/IMOMD-RRTStar.