 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modelling, and Control of a Reconfigurable Rotary Series Elastic Actuator with Nonlinear Stiffness for Assistive Robots
Paper and Code
May 28, 2022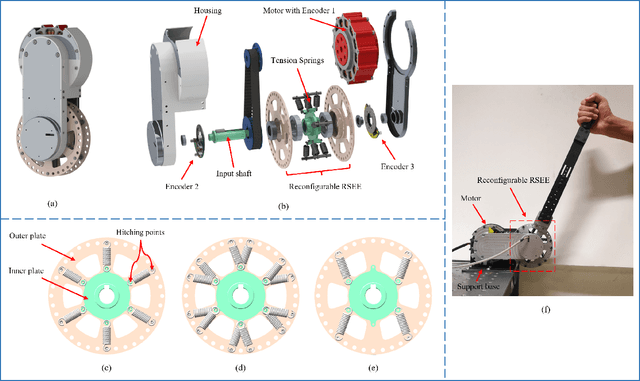
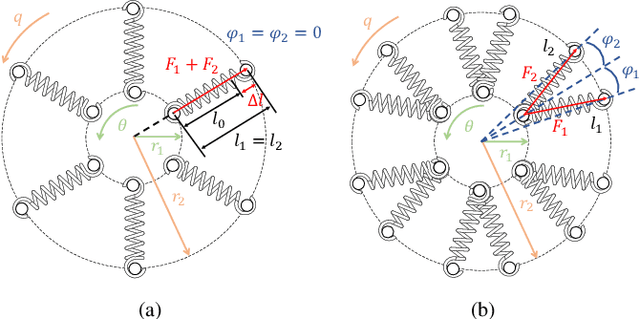
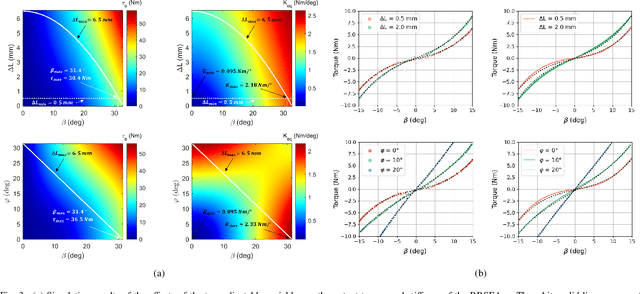
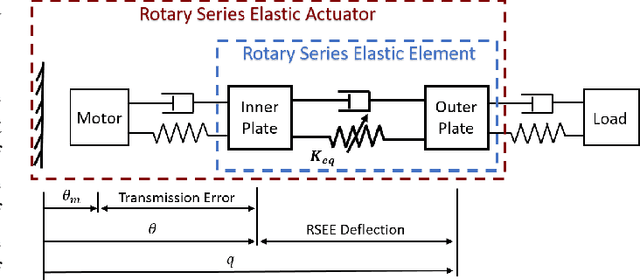
In assistive robots, compliant actuator is a key component in establishing safe and satisfactory physical human-robot interaction (pHRI). The performance of compliant actuators largely depends on the stiffness of the elastic element. Generally, low stiffness is desirable to achieve low impedance, high fidelity of force control and safe pHRI, while high stiffness is required to ensure sufficient force bandwidth and output force. These requirements, however, are contradictory and often vary according to different tasks and conditions. In order to address the contradiction of stiffness selection and improve adaptability to different applications, we develop a reconfigurable rotary series elastic actuator with nonlinear stiffness (RRSEAns) for assistive robots. In this paper, an accurate model of the reconfigurable rotary series elastic element (RSEE) is presented and the adjusting principles are investigated, followed by detailed analysis and experimental validation. The RRSEAns can provide a wide range of stiffness from 0.095 Nm/deg to 2.33 Nm/deg, and different stiffness profiles can be yielded with respect to different configuration of the reconfigurable RSEE. The overall performance of the RRSEAns is verified by experiments on frequency response, torque control and pHRI, which is adequate for most applications in assistive robots. Specifically, the root-mean-square (RMS) error of the interaction torque results as low as 0.07 Nm in transparent/human-in-charge mode, demonstrating the advantages of the RRSEAns in pHRI.