 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Horizon Motion Planning via Sampling and Segmented Trajectory Optimization
Paper and Code
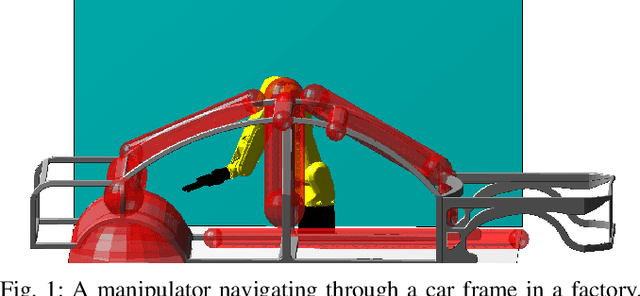
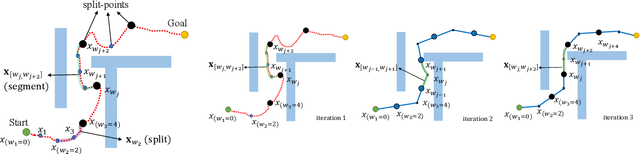
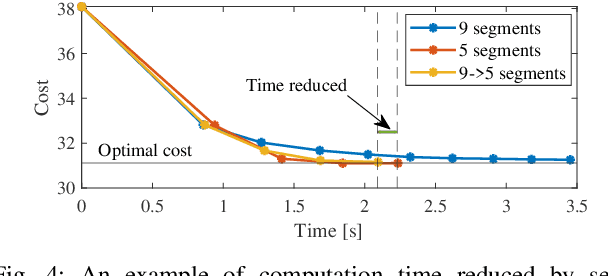
This paper presents a hybrid robot motion planner that generates long-horizon motion plans for robot navigation in environments with obstacles. We propose a hybrid planner, RRT* with segmented trajectory optimization (RRT*-sOpt), which combines the merits of sampling-based planning, optimization-based planning, and trajectory splitting to quickly plan for a collision-free and dynamically-feasible motion plan. When generating a plan, the RRT* layer quickly samples a semi-optimal path and sets it as an initial reference path. Then, the sOpt layer splits the reference path and performs optimization on each segment. It then splits the new trajectory again and repeats the process until the whole trajectory converges. We also propose to reduce the number of segments before convergence with the aim of further reducing computation time. Simulation results show that RRT*-sOpt benefits from the hybrid structure with trajectory splitting and performs robustly in various robot platforms and scenarios.