 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle Videos Revisited: Tracking Through Occlusions Using Point Trajectories
Paper and Code
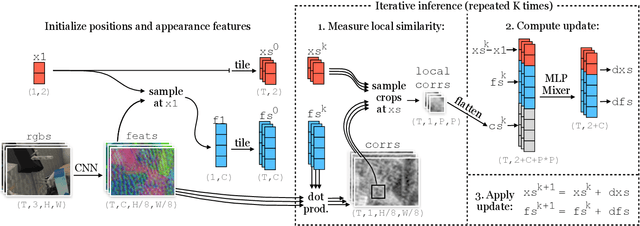
Tracking pixels in videos is typically studied as an optical flow estimation problem, where every pixel is described with a displacement vector that locates it in the next frame. Even though wider temporal context is freely available, prior efforts to take this into account have yielded only small gains over 2-frame methods. In this paper, we revisit Sand and Teller's "particle video" approach, and study pixel tracking as a long-range motion estimation problem, where every pixel is described with a trajectory that locates it in multiple future frames. We re-build this classic approach using components that drive the current state-of-the-art in flow and object tracking, such as dense cost maps, iterative optimization, and learned appearance updates. We train our models using long-range amodal point trajectories mined from existing optical flow datasets that we synthetically augment with occlusions. We test our approach in trajectory estimation benchmarks and in keypoint label propagation tasks, and compare favorably against state-of-the-art optical flow and feature tracking methods.