 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHAIL: Safety-Aware Hierarchical Adversarial Imitation Learning for Autonomous Driving in Urban Environments
Paper and Code
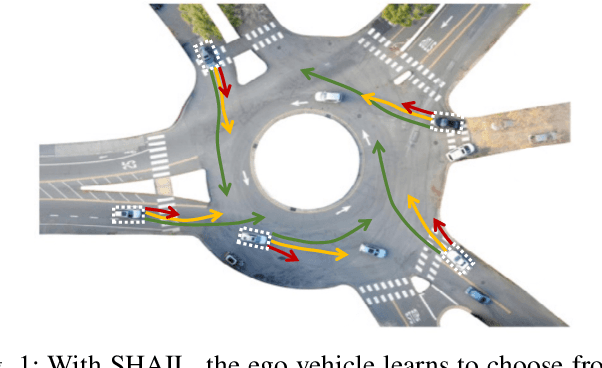
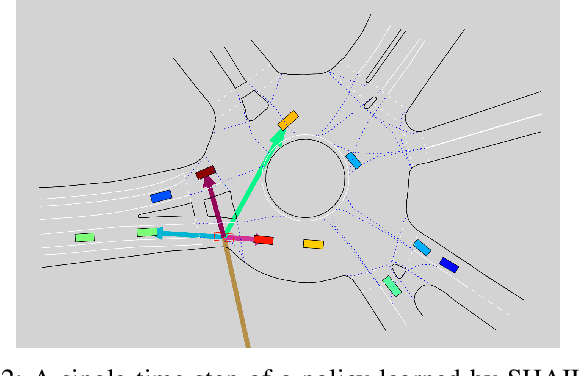
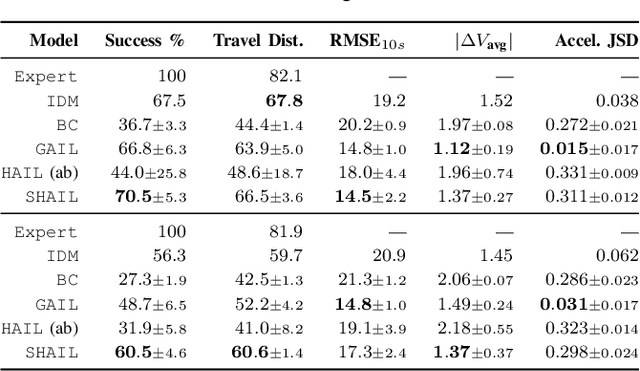
Designing a safe and human-like decision-making system for an autonomous vehicle is a challenging task. Generative imitation learning is one possible approach for automating policy-building by leveraging both real-world and simulated decisions. Previous work that applies generative imitation learning to autonomous driving policies focuses on learning a low-level controller for simple settings. However, to scale to complex settings, many autonomous driving systems combine fixed, safe, optimization-based low-level controllers with high-level decision-making logic that selects the appropriate task and associated controller. In this paper, we attempt to bridge this gap in complexity by employing Safety-Aware Hierarchical Adversarial Imitation Learning (SHAIL), a method for learning a high-level policy that selects from a set of low-level controller instances in a way that imitates low-level driving data on-policy. We introduce an urban roundabout simulator that controls non-ego vehicles using real data from the Interaction dataset. We then show empirically that our approach can produce better behavior than previous approaches in driver imitation which have difficulty scaling to complex environments. Our implementation is available at https://github.com/sisl/InteractionImitation.