 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Infield Navigation: leveraging simulated data for crop row detection
Paper and Code
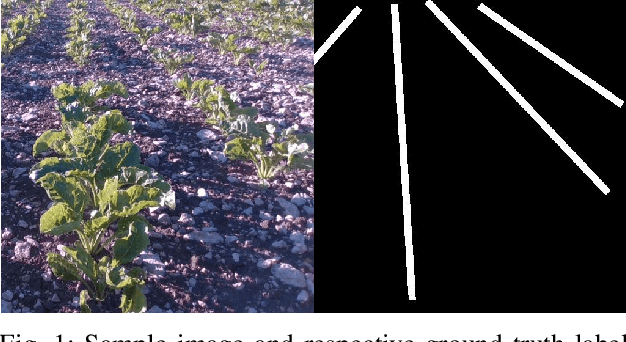
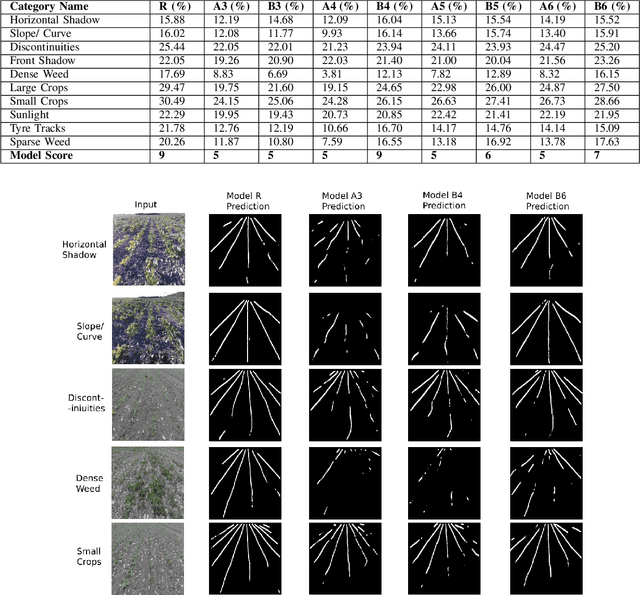
Agricultural datasets for crop row detection are often bound by their limited number of images. This restricts the researchers from developing deep learning based models for precision agricultural tasks involving crop row detection. We suggest the utilization of small real-world datasets along with additional data generated by simulations to yield similar crop row detection performance as that of a model trained with a large real world dataset. Our method could reach the performance of a deep learning based crop row detection model trained with real-world data by using 60% less labelled real-world data. Our model performed well against field variations such as shadows, sunlight and grow stages. We introduce an automated pipeline to generate labelled images for crop row detection in simulation domain. An extensive comparison is done to analyze the contribution of simulated data towards reaching robust crop row detection in various real-world field scenarios.