 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Concept-based Topometric Semantic Mapping for Hierarchical Path-planning from Speech Instructions
Paper and Code
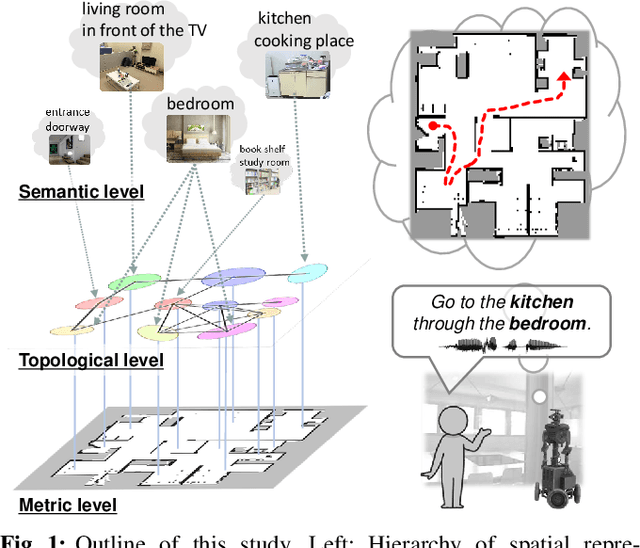
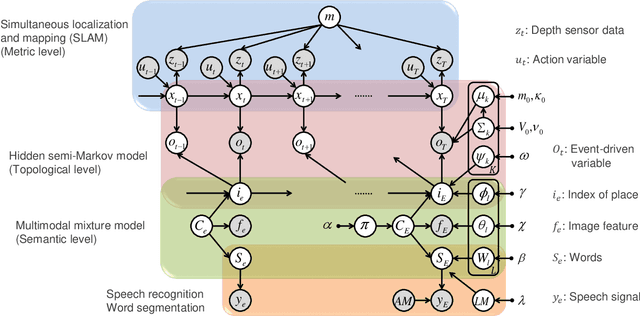
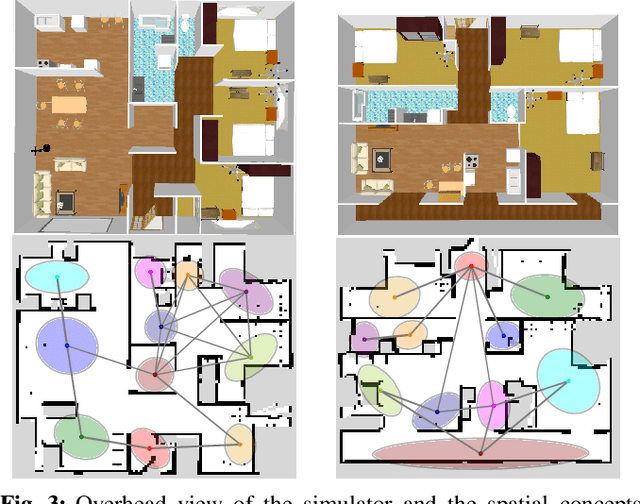
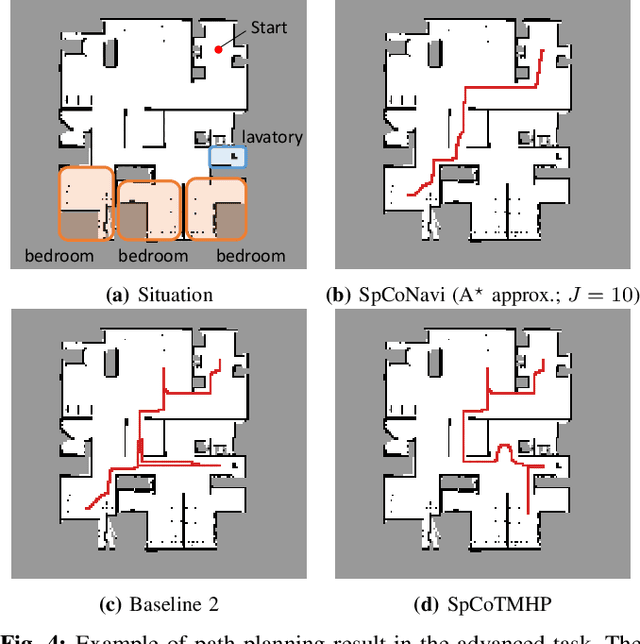
Navigating to destinations using human speech instructions is an important task for autonomous mobile robots that operate in the real world. Spatial representations include a semantic level that represents an abstracted location category, a topological level that represents their connectivity, and a metric level that depends on the structure of the environment. The purpose of this study is to realize a hierarchical spatial representation using a topometric semantic map and planning efficient paths through human-robot interactions. We propose a novel probabilistic generative model, SpCoTMHP, that forms a topometric semantic map that adapts to the environment and leads to hierarchical path planning. We also developed approximate inference methods for path planning, where the levels of the hierarchy can influence each other. The proposed path planning method is theoretically supported by deriving a formulation based on control as probabilistic inference. The navigation experiment using human speech instruction shows that the proposed spatial concept-based hierarchical path planning improves the performance and reduces the calculation cost compared with conventional methods. Hierarchical spatial representation provides a mutually understandable form for humans and robots to render language-based navigation tasks feasible.