 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile-Sensitive NewtonianVAE for High-Accuracy Industrial Connector-Socket Insertion
Paper and Code
Mar 10, 2022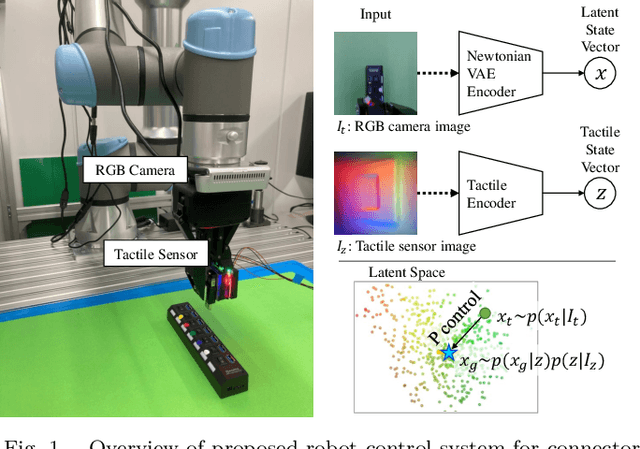
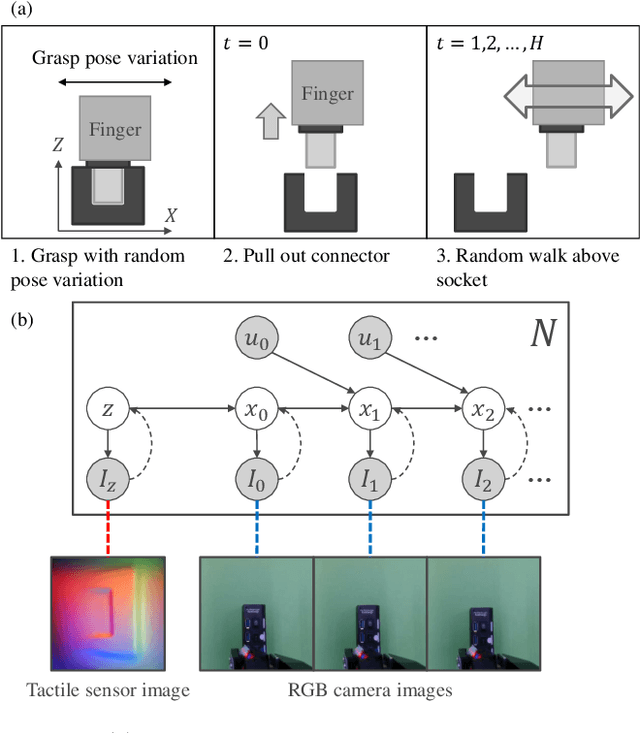
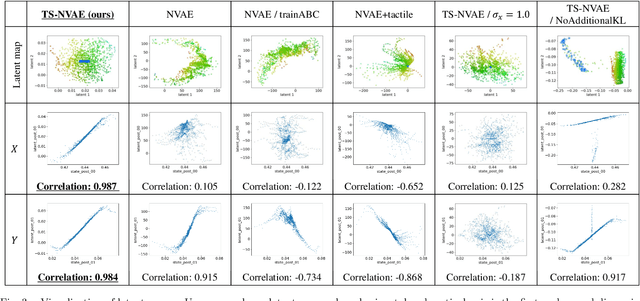
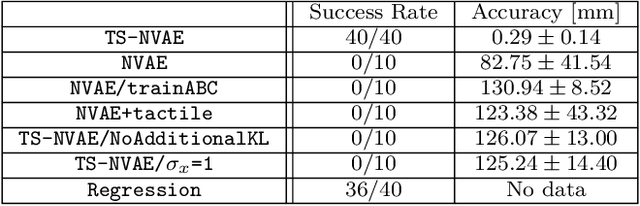
An industrial connector-socket insertion task requires sub-millimeter positioning and compensation of grasp pose of a connector. Thus high accurate estimation of relative pose between socket and connector is a key factor to achieve the task. World models are promising technology for visuo-motor control. They obtain appropriate state representation for control to jointly optimize feature extraction and latent dynamics model. Recent study shows NewtonianVAE, which is a kind of the world models, acquires latent space which is equivalent to mapping from images to physical coordinate. Proportional control can be achieved in the latent space of NewtonianVAE. However, application of NewtonianVAE to high accuracy industrial tasks in physical environments is open problem. Moreover, there is no general frameworks to compensate goal position in the obtained latent space considering the grasp pose. In this work, we apply NewtonianVAE to USB connector insertion with grasp pose variation in the physical environments. We adopt a GelSight type tactile sensor and estimate insertion position compensated by the grasp pose of the connector. Our method trains the latent space in an end-to-end manner, and simple proportional control is available. Therefore, it requires no additional engineering and annotation. Experimental results show that the proposed method, Tactile-Sensitive NewtonianVAE, outperforms naive combination of regression-based grasp pose estimator and coordinate transformation. Moreover, we reveal the original NewtonianVAE does not work in some situation, and demonstrate that domain knowledge induction improves model accuracy. This domain knowledge is easy to be known from specification of robots or measurement.