 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Model Predictive Control for Quadrotors
Paper and Code
Feb 15, 2022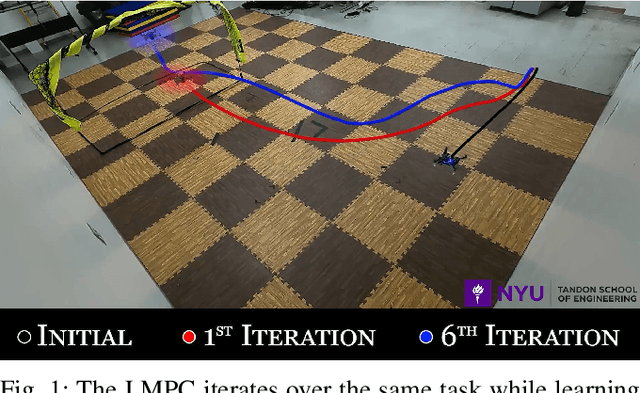
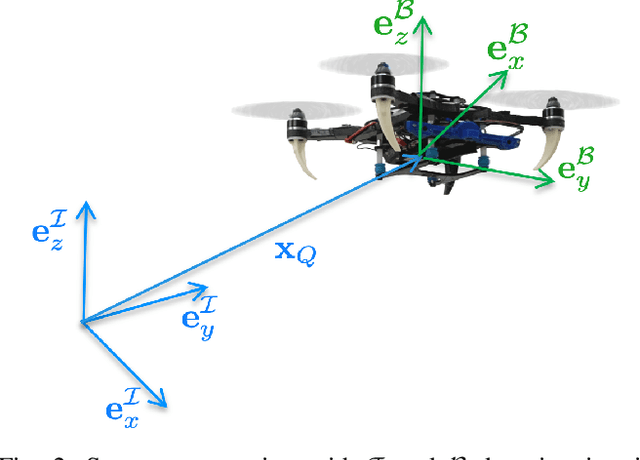
Aerial robots can enhance their safe and agile navigation in complex and cluttered environments by efficiently exploiting the information collected during a given task. In this paper, we address the learning model predictive control problem for quadrotors. We design a learning receding--horizon nonlinear control strategy directly formulated on the system nonlinear manifold configuration space SO(3)xR^3. The proposed approach exploits past successful task iterations to improve the system performance over time while respecting system dynamics and actuator constraints. We further relax its computational complexity making it compatible with real-time quadrotor control requirements. We show the effectiveness of the proposed approach in learning a minimum time control task, respecting dynamics, actuators, and environment constraints. Several experiments in simulation and real-world set-up validate the proposed approach.