 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Scene BERT: Improving object detection by searching for challenging groups of data
Paper and Code
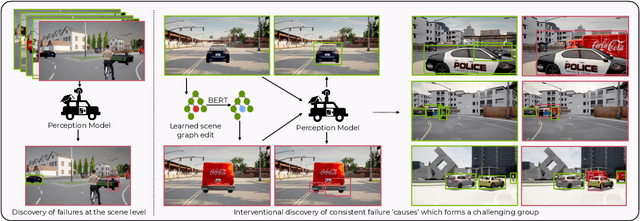
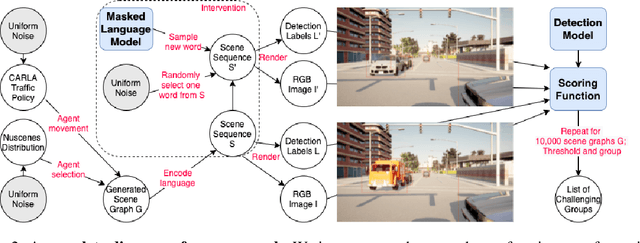
Modern computer vision applications rely on learning-based perception modules parameterized with neural networks for tasks like object detection. These modules frequently have low expected error overall but high error on atypical groups of data due to biases inherent in the training process. In building autonomous vehicles (AV), this problem is an especially important challenge because their perception modules are crucial to the overall system performance. After identifying failures in AV, a human team will comb through the associated data to group perception failures that share common causes. More data from these groups is then collected and annotated before retraining the model to fix the issue. In other words, error groups are found and addressed in hindsight. Our main contribution is a pseudo-automatic method to discover such groups in foresight by performing causal interventions on simulated scenes. To keep our interventions on the data manifold, we utilize masked language models. We verify that the prioritized groups found via intervention are challenging for the object detector and show that retraining with data collected from these groups helps inordinately compared to adding more IID data. We also plan to release software to run interventions in simulated scenes, which we hope will benefit the causality community.