 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Probabilistic Multi-Robot Collision Avoidance Using Buffered Uncertainty-Aware Voronoi Cells
Paper and Code
Jan 11, 2022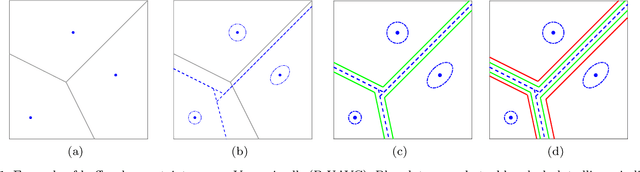
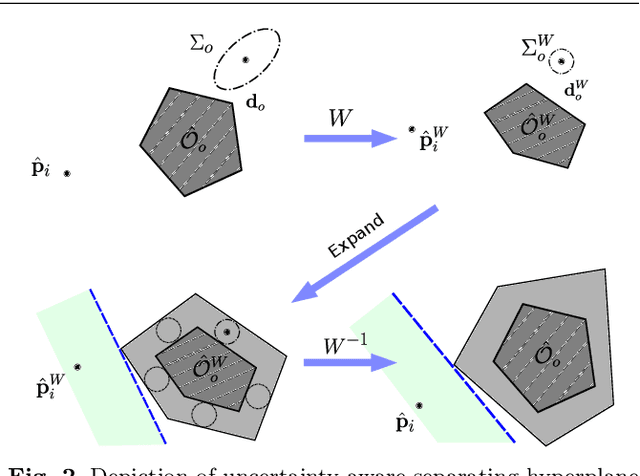
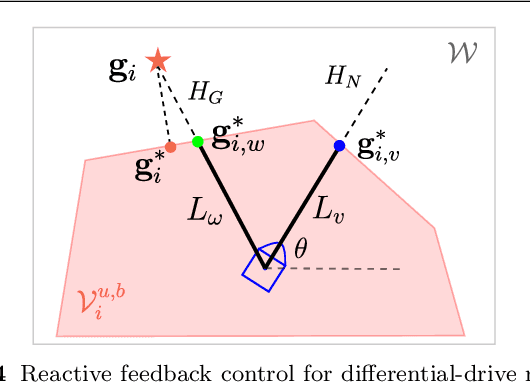
In this paper, we present a decentralized and communication-free collision avoidance approach for multi-robot systems that accounts for both robot localization and sensing uncertainties. The approach relies on the computation of an uncertainty-aware safe region for each robot to navigate among other robots and static obstacles in the environment, under the assumption of Gaussian-distributed uncertainty. In particular, at each time step, we construct a chance-constrained buffered uncertainty-aware Voronoi cell (B-UAVC) for each robot given a specified collision probability threshold. Probabilistic collision avoidance is achieved by constraining the motion of each robot to be within its corresponding B-UAVC, i.e. the collision probability between the robots and obstacles remains below the specified threshold. The proposed approach is decentralized, communication-free, scalable with the number of robots and robust to robots' localization and sensing uncertainties. We applied the approach to single-integrator, double-integrator, differential-drive robots, and robots with general nonlinear dynamics. Extensive simulations and experiments with a team of ground vehicles, quadrotors, and heterogeneous robot teams are performed to analyze and validate the proposed approach.