 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRIS-aided D2D Communication Design for URLLC Packet Delivery
Paper and Code
Nov 26, 2021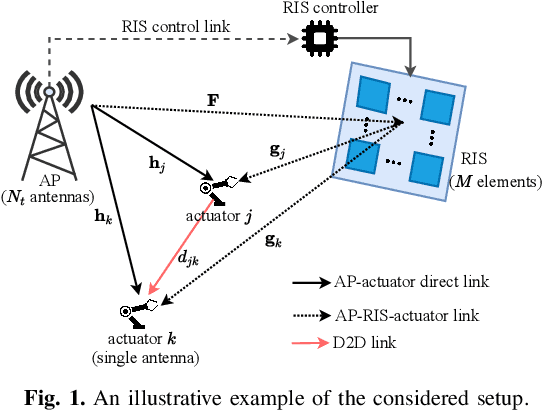
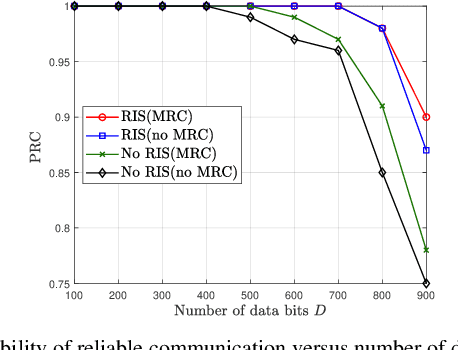
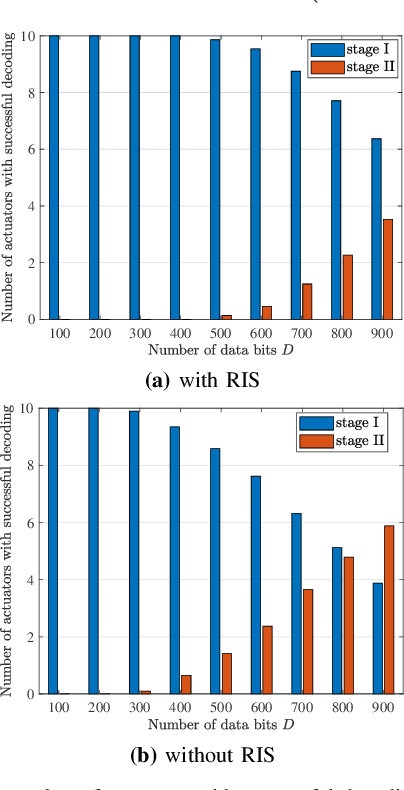
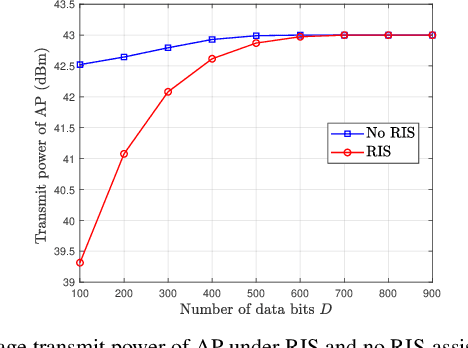
In this paper, we consider a smart factory scenario where a set of actuators receive critical control signals from an access point (AP) with reliability and low latency requirements. We investigate jointly active beamforming at the AP and passive phase shifting at the reconfigurable intelligent surface (RIS) for successfully delivering the control signals from the AP to the actuators within a required time duration. The transmission follows a two-stage design. In the first stage, each actuator can both receive the direct signal from AP and the reflected signal from the RIS. In the second stage, the actuators with successful reception in the first stage, relay the message through the D2D network to the actuators with failed receptions. We formulate a non-convex optimization problem where we first obtain an equivalent but more tractable form by addressing the problem with discrete indicator functions. Then, Frobenius inner product based equality is applied for decoupling the optimization variables. Further, we adopt a penalty-based approach to resolve the rank-one constraints. Finally, we deal with the $\ell_0$-norm by $\ell_1$-norm approximation and add an extra term $\ell_1-\ell_2$ for sparsity. Numerical results reveal that the proposed two-stage RIS-aided D2D communication protocol is effective for enabling reliable communication with latency requirements.