 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding the Effects of Dataset Characteristics on Offline Reinforcement Learning
Paper and Code
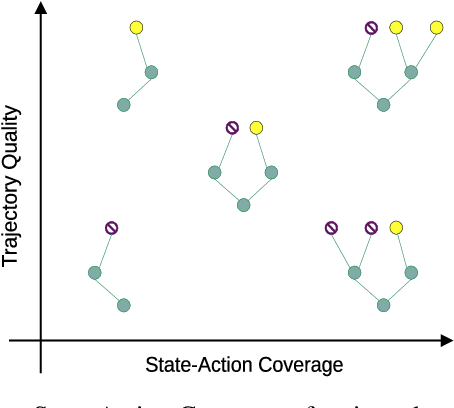
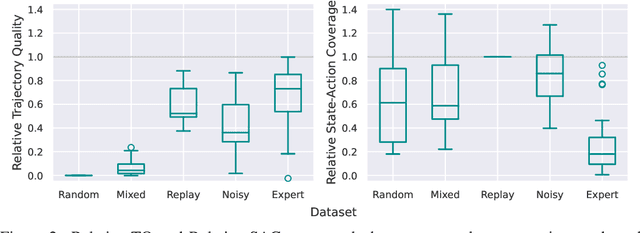
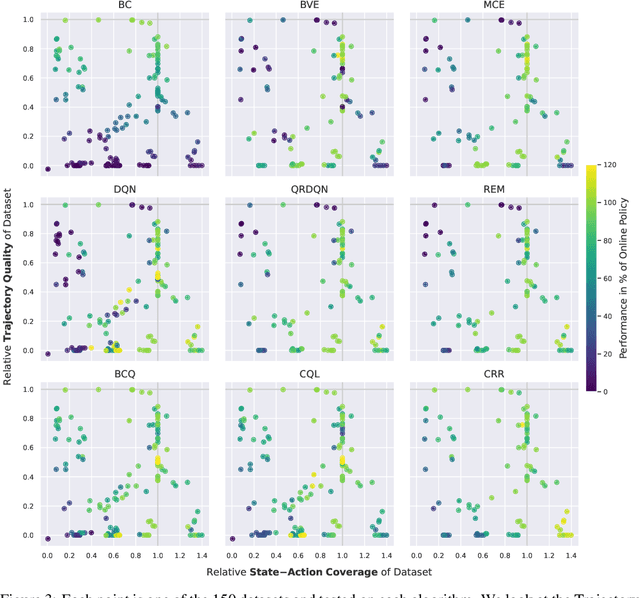
In real world, affecting the environment by a weak policy can be expensive or very risky, therefore hampers real world applications of reinforcement learning. Offline Reinforcement Learning (RL) can learn policies from a given dataset without interacting with the environment. However, the dataset is the only source of information for an Offline RL algorithm and determines the performance of the learned policy. We still lack studies on how dataset characteristics influence different Offline RL algorithms. Therefore, we conducted a comprehensive empirical analysis of how dataset characteristics effect the performance of Offline RL algorithms for discrete action environments. A dataset is characterized by two metrics: (1) the average dataset return measured by the Trajectory Quality (TQ) and (2) the coverage measured by the State-Action Coverage (SACo). We found that variants of the off-policy Deep Q-Network family require datasets with high SACo to perform well. Algorithms that constrain the learned policy towards the given dataset perform well for datasets with high TQ or SACo. For datasets with high TQ, Behavior Cloning outperforms or performs similarly to the best Offline RL algorithms.