 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferential Flatness and Flatness Inspired Control of Aerial Manipulators based on Lagrangian Reduction
Paper and Code
Nov 02, 2021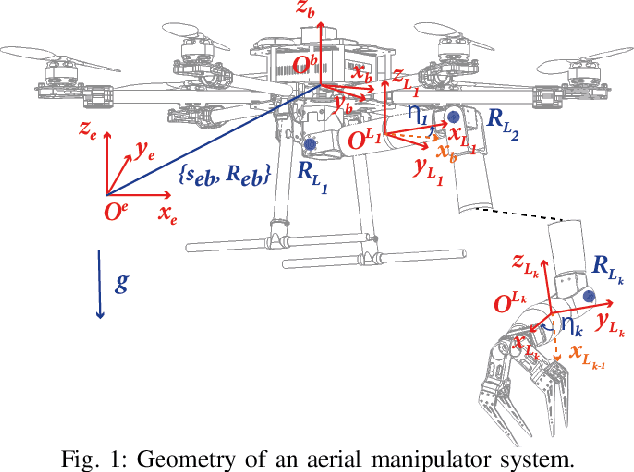
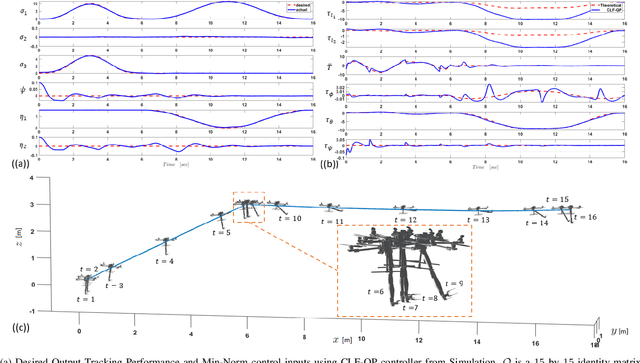
This paper shows that the dynamics of a general class of aerial manipulators, consist of an underactuated multi-rotor base with an arbitrary k-linked articulated manipulator, are differentially flat. Methods of Lagrangian Reduction under broken symmetries produce reduced equations of motion whose key variables: center-of-mass linear momentum, vehicle yaw angle, and manipulator relative joint angles become the flat outputs. Utilizing flatness theory and a second-order dynamic extension of the thrust input, we transform the mechanics of aerial manipulators to their equivalent trivial form with a valid relative degree. Using this flatness transformation, a quadratic programming-based controller is proposed within a Control Lyapunov Function (CLF-QP) framework, and its performance is verified in simulation.