 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCycle-Consistent World Models for Domain Independent Latent Imagination
Paper and Code
Oct 02, 2021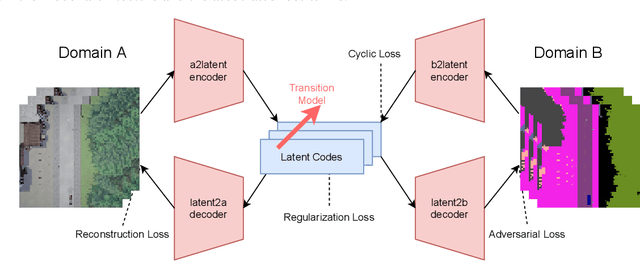
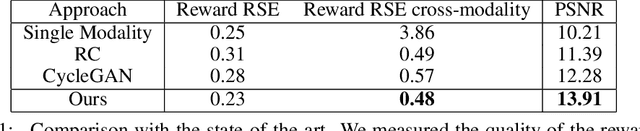

End-to-end autonomous driving seeks to solve the perception, decision, and control problems in an integrated way, which can be easier to generalize at scale and be more adapting to new scenarios. However, high costs and risks make it very hard to train autonomous cars in the real world. Simulations can therefore be a powerful tool to enable training. Due to slightly different observations, agents trained and evaluated solely in simulation often perform well there but have difficulties in real-world environments. To tackle this problem, we propose a novel model-based reinforcement learning approach called Cycleconsistent World Models. Contrary to related approaches, our model can embed two modalities in a shared latent space and thereby learn from samples in one modality (e.g., simulated data) and be used for inference in different domain (e.g., real-world data). Our experiments using different modalities in the CARLA simulator showed that this enables CCWM to outperform state-of-the-art domain adaptation approaches. Furthermore, we show that CCWM can decode a given latent representation into semantically coherent observations in both modalities.