 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDORA: Distributed Online Risk-Aware Explorer
Paper and Code
Sep 29, 2021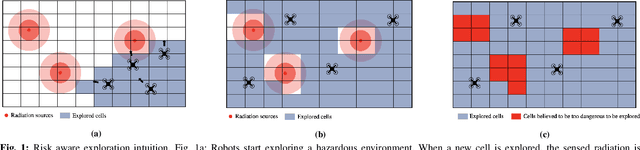
Exploration of unknown environments is an important challenge in the field of robotics. While a single robot can achieve this task alone, evidence suggests it could be accomplished more efficiently by groups of robots, with advantages in terms of terrain coverage as well as robustness to failures. Exploration can be guided through belief maps, which provide probabilistic information about which part of the terrain is interesting to explore (either based on risk management or reward). This process can be centrally coordinated by building a collective belief map on a common server. However, relying on a central processing station creates a communication bottleneck and single point of failure for the system. In this paper, we present Distributed Online Risk-Aware (DORA) Explorer, an exploration system that leverages decentralized information sharing to update a common risk belief map. DORA Explorer allows a group of robots to explore an unknown environment discretized as a 2D grid with obstacles, with high coverage while minimizing exposure to risk, effectively reducing robot failures