 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetaDrive: Composing Diverse Driving Scenarios for Generalizable Reinforcement Learning
Paper and Code
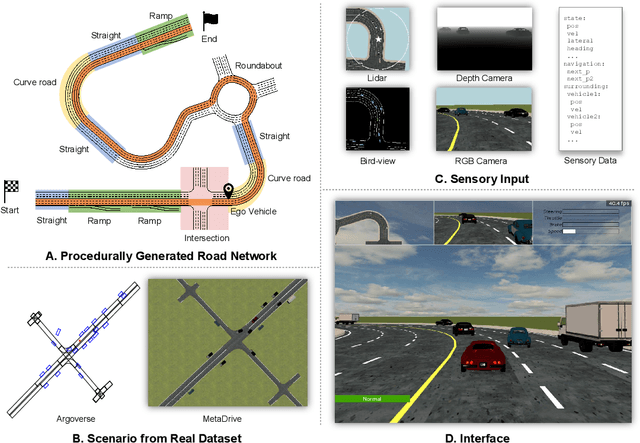
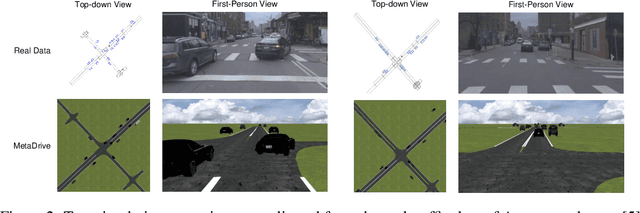

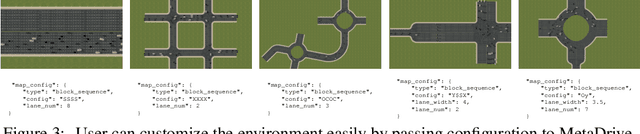
Driving safely requires multiple capabilities from human and intelligent agents, such as the generalizability to unseen environments, the decision making in complex multi-agent settings, and the safety awareness of the surrounding traffic. Despite the great success of reinforcement learning, most of the RL research studies each capability separately due to the lack of the integrated interactive environments. In this work, we develop a new driving simulation platform called MetaDrive for the study of generalizable reinforcement learning algorithms. MetaDrive is highly compositional, which can generate an infinite number of diverse driving scenarios from both the procedural generation and the real traffic data replay. Based on MetaDrive, we construct a variety of RL tasks and baselines in both single-agent and multi-agent settings, including benchmarking generalizability across unseen scenes, safe exploration, and learning multi-agent traffic. We open-source this simulator and maintain its development at: https://github.com/decisionforce/metadrive