 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-Based Task Planning with Learned Skill Effect Models for Lifelong Robotic Manipulation
Paper and Code
Sep 17, 2021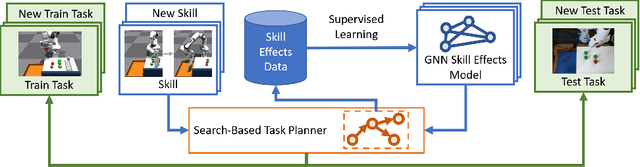

Lifelong-learning robots need to be able to acquire new skills and plan for new tasks over time. Prior works on planning with skills often make assumptions on the structure of skills and tasks, like subgoal skills, shared skill implementations, or learning task-specific plan skeletons, that limit their application to new and different skills and tasks. By contrast, we propose doing task planning by jointly searching in the space of skills and their parameters with skill effect models learned in simulation. Our approach is flexible about skill parameterizations and task specifications, and we use an iterative training procedure to efficiently generate relevant data to train such models. Experiments demonstrate the ability of our planner to integrate new skills in a lifelong manner, finding new task strategies with lower costs in both train and test tasks. We additionally show that our method can transfer to the real world without further fine-tuning.