 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProjected State-action Balancing Weights for Offline Reinforcement Learning
Paper and Code
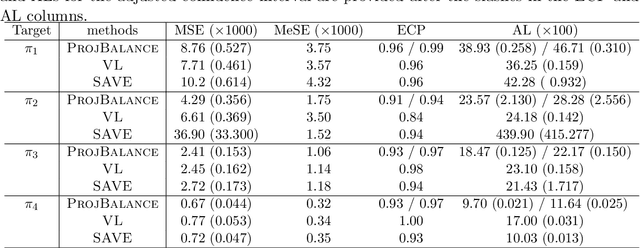
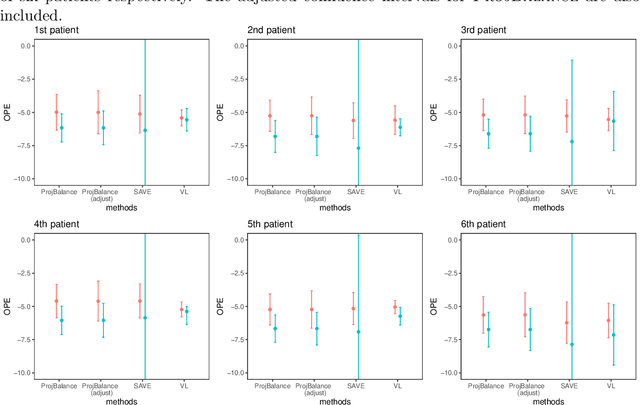
Offline policy evaluation (OPE) is considered a fundamental and challenging problem in reinforcement learning (RL). This paper focuses on the value estimation of a target policy based on pre-collected data generated from a possibly different policy, under the framework of infinite-horizon Markov decision processes. Motivated by the recently developed marginal importance sampling method in RL and the covariate balancing idea in causal inference, we propose a novel estimator with approximately projected state-action balancing weights for the policy value estimation. We obtain the convergence rate of these weights, and show that the proposed value estimator is semi-parametric efficient under technical conditions. In terms of asymptotics, our results scale with both the number of trajectories and the number of decision points at each trajectory. As such, consistency can still be achieved with a limited number of subjects when the number of decision points diverges. In addition, we make a first attempt towards characterizing the difficulty of OPE problems, which may be of independent interest. Numerical experiments demonstrate the promising performance of our proposed estimator.