 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV Trajectory Planning in Wireless Sensor Networks for Energy Consumption Minimization by Deep Reinforcement Learning
Paper and Code
Aug 01, 2021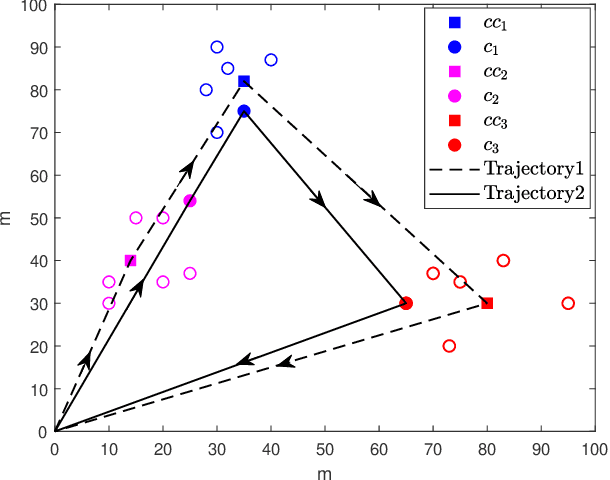
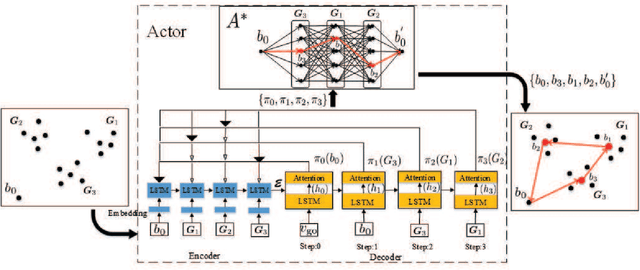
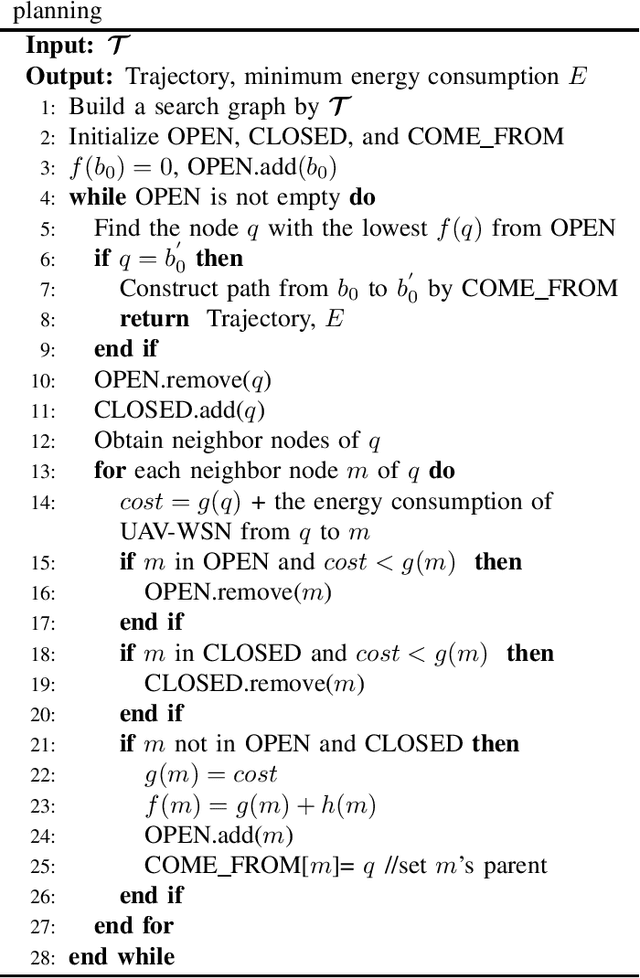
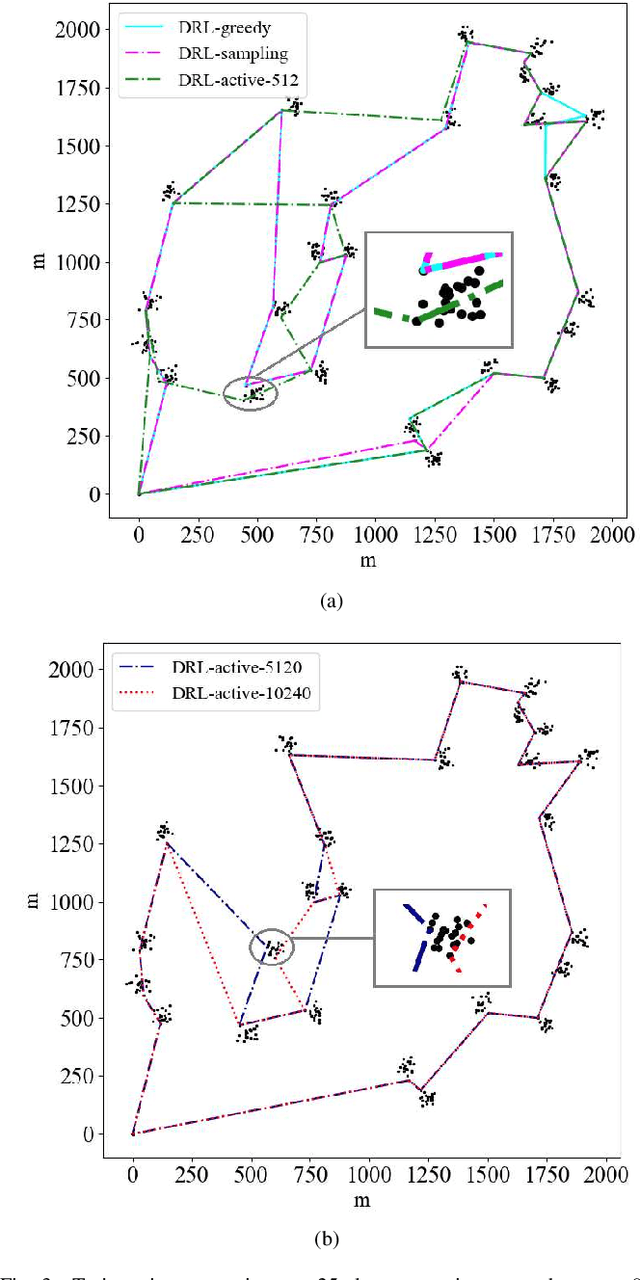
Unmanned aerial vehicles (UAVs) have emerged as a promising candidate solution for data collection of large-scale wireless sensor networks (WSNs). In this paper, we investigate a UAV-aided WSN, where cluster heads (CHs) receive data from their member nodes, and a UAV is dispatched to collect data from CHs along the planned trajectory. We aim to minimize the total energy consumption of the UAV-WSN system in a complete round of data collection. Toward this end, we formulate the energy consumption minimization problem as a constrained combinatorial optimization problem by jointly selecting CHs from nodes within clusters and planning the UAV's visiting order to the selected CHs. The formulated energy consumption minimization problem is NP-hard, and hence, hard to solve optimally. In order to tackle this challenge, we propose a novel deep reinforcement learning (DRL) technique, pointer network-A* (Ptr-A*), which can efficiently learn from experiences the UAV trajectory policy for minimizing the energy consumption. The UAV's start point and the WSN with a set of pre-determined clusters are fed into the Ptr-A*, and the Ptr-A* outputs a group of CHs and the visiting order to these CHs, i.e., the UAV's trajectory. The parameters of the Ptr-A* are trained on small-scale clusters problem instances for faster training by using the actor-critic algorithm in an unsupervised manner. At inference, three search strategies are also proposed to improve the quality of solutions. Simulation results show that the trained models based on 20-clusters and 40-clusters have a good generalization ability to solve the UAV's trajectory planning problem in WSNs with different numbers of clusters, without the need to retrain the models. Furthermore, the results show that our proposed DRL algorithm outperforms two baseline techniques.