 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Spatio-Temporal Poisson Point Process: A Simple Model for the Alignment of Event Camera Data
Paper and Code
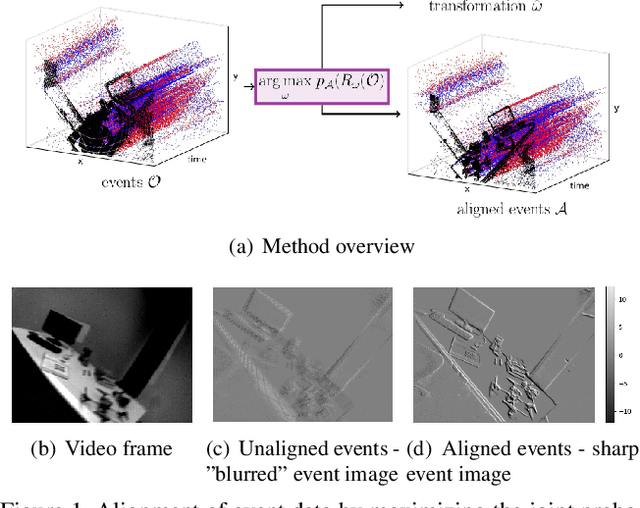
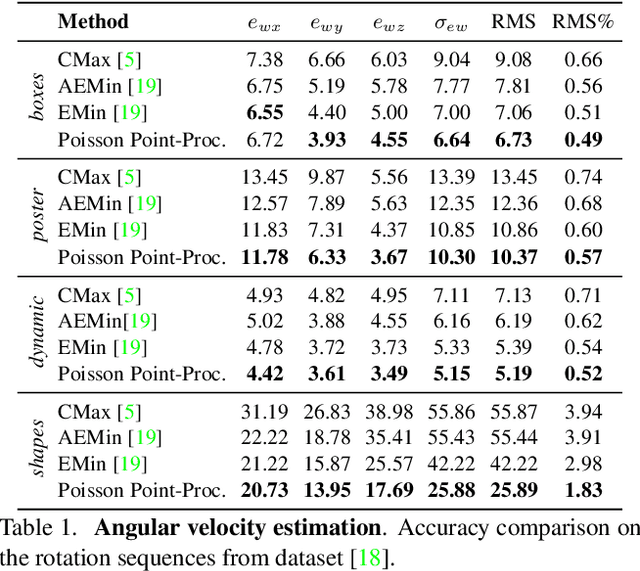
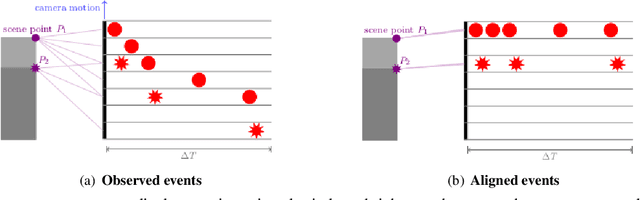
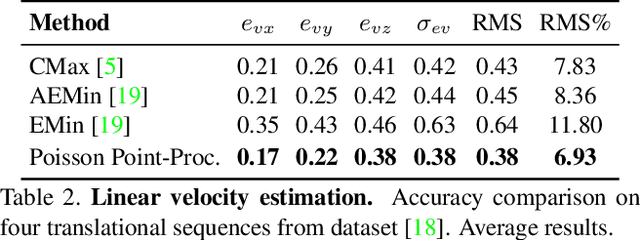
Event cameras, inspired by biological vision systems, provide a natural and data efficient representation of visual information. Visual information is acquired in the form of events that are triggered by local brightness changes. Each pixel location of the camera's sensor records events asynchronously and independently with very high temporal resolution. However, because most brightness changes are triggered by relative motion of the camera and the scene, the events recorded at a single sensor location seldom correspond to the same world point. To extract meaningful information from event cameras, it is helpful to register events that were triggered by the same underlying world point. In this work we propose a new model of event data that captures its natural spatio-temporal structure. We start by developing a model for aligned event data. That is, we develop a model for the data as though it has been perfectly registered already. In particular, we model the aligned data as a spatio-temporal Poisson point process. Based on this model, we develop a maximum likelihood approach to registering events that are not yet aligned. That is, we find transformations of the observed events that make them as likely as possible under our model. In particular we extract the camera rotation that leads to the best event alignment. We show new state of the art accuracy for rotational velocity estimation on the DAVIS 240C dataset. In addition, our method is also faster and has lower computational complexity than several competing methods.