 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised identification of surgical robotic actions from small non homogeneous datasets
Paper and Code
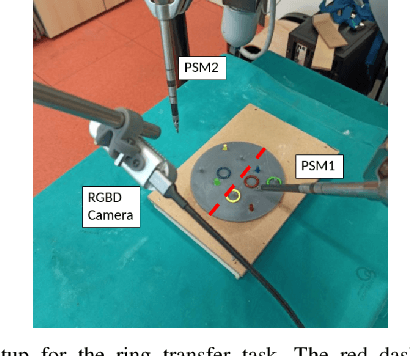
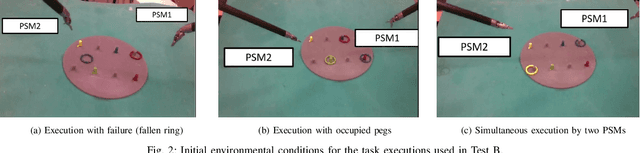
Robot-assisted surgery is an established clinical practice. The automatic identification of surgical actions is needed for a range of applications, including performance assessment of trainees and surgical process modeling for autonomous execution and monitoring. However, supervised action identification is not feasible, due to the burden of manually annotating recordings of potentially complex and long surgical executions. Moreover, often few example executions of a surgical procedure can be recorded. This paper proposes a novel algorithm for unsupervised identification of surgical actions in a standard surgical training task, the ring transfer, executed with da Vinci Research Kit. Exploiting kinematic and semantic visual features automatically extracted from a very limited dataset of executions, we are able to significantly outperform the state-of-the-art results for a similar application, improving the quality of segmentation (88% vs. 82% matching score) and clustering (67% vs. 54% F1-score) even in the presence of noise, short actions and non homogeneous workflows, i.e. non repetitive action sequences. Full action identification on hardware with standard commercial specifications is performed in less than 1 s for single execution.