 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVote from the Center: 6 DoF Pose Estimation in RGB-D Images by Radial Keypoint Voting
Paper and Code
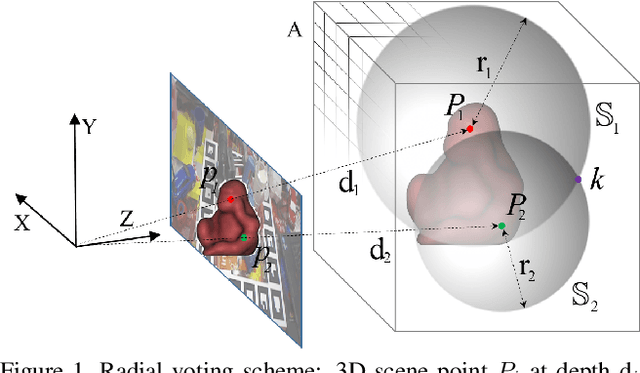
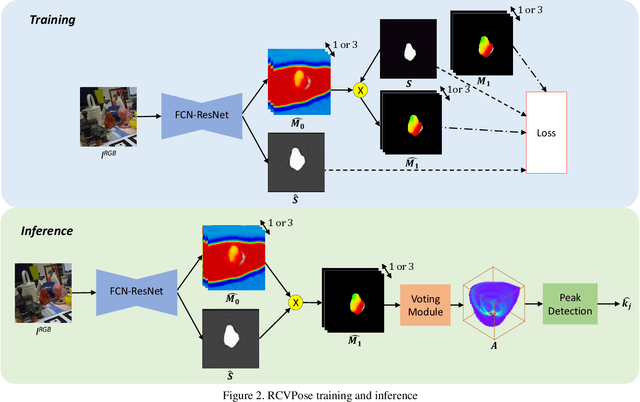
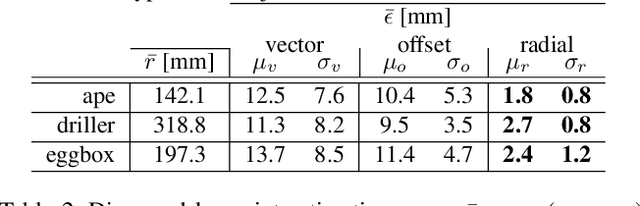
We propose a novel keypoint voting scheme based on intersecting spheres, that is more accurate than existing schemes and allows for a smaller set of more disperse keypoints. The scheme forms the basis of the proposed RCVPose method for 6 DoF pose estimation of 3D objects in RGB-D data, which is particularly effective at handling occlusions. A CNN is trained to estimate the distance between the 3D point corresponding to the depth mode of each RGB pixel, and a set of 3 disperse keypoints defined in the object frame. At inference, a sphere of radius equal to this estimated distance is generated, centered at each 3D point. The surface of these spheres votes to increment a 3D accumulator space, the peaks of which indicate keypoint locations. The proposed radial voting scheme is more accurate than previous vector or offset schemes, and robust to disperse keypoints. Experiments demonstrate RCVPose to be highly accurate and competitive, achieving state-of-the-art results on LINEMOD 99.7%, YCB-Video 97.2% datasets, and notably scoring +7.9% higher than previous methods on the challenging Occlusion LINEMOD 71.1% dataset.