 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparsePoint: Fully End-to-End Sparse 3D Object Detector
Paper and Code
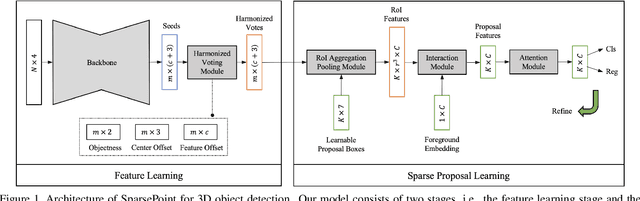
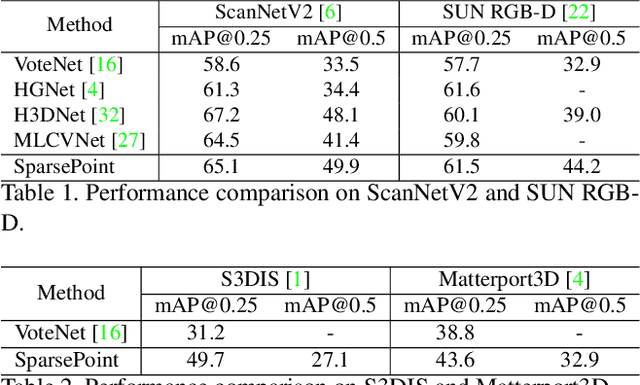
Object detectors based on sparse object proposals have recently been proven to be successful in the 2D domain, which makes it possible to establish a fully end-to-end detector without time-consuming post-processing. This development is also attractive for 3D object detectors. However, considering the remarkably larger search space in the 3D domain, whether it is feasible to adopt the sparse method in the 3D object detection setting is still an open question. In this paper, we propose SparsePoint, the first sparse method for 3D object detection. Our SparsePoint adopts a number of learnable proposals to encode most likely potential positions of 3D objects and a foreground embedding to encode shared semantic features of all objects. Besides, with the attention module to provide object-level interaction for redundant proposal removal and Hungarian algorithm to supply one-one label assignment, our method can produce sparse and accurate predictions. SparsePoint sets a new state-of-the-art on four public datasets, including ScanNetV2, SUN RGB-D, S3DIS, and Matterport3D. Our code will be publicly available soon.