 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized 2-Robot Transportation with Local and Indirect Sensing
Paper and Code
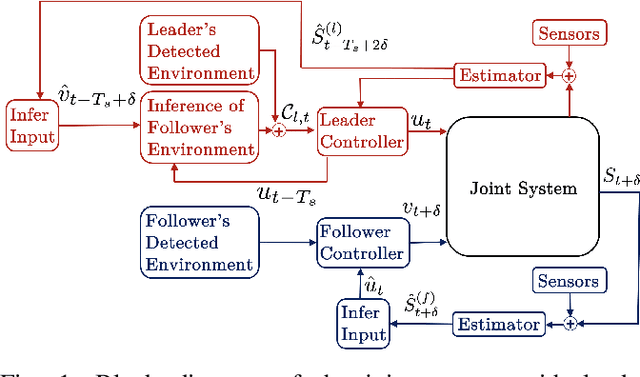
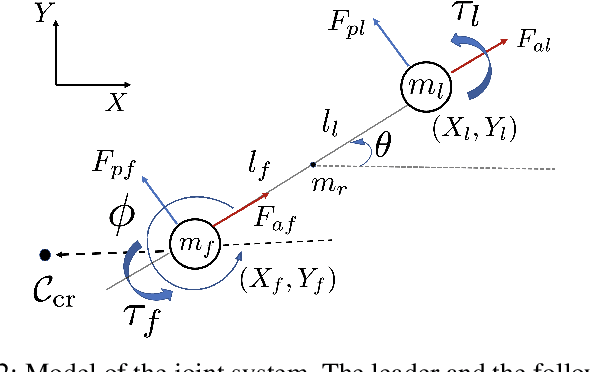
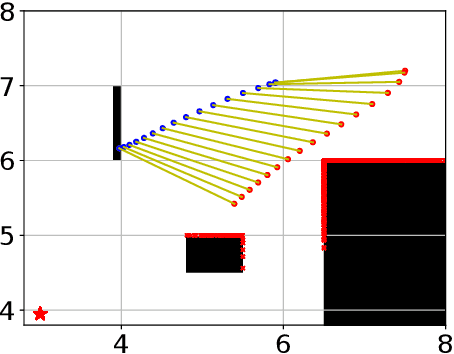
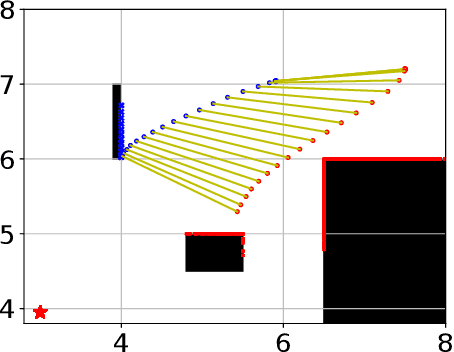
In this paper, we propose a leader-follower hierarchical strategy for two robots collaboratively transporting an object in a partially known environment with obstacles. Both robots sense the local surrounding environment and react to obstacles in their proximity. We consider no explicit communication, so the local environment information and the control actions are not shared between the robots. At any given time step, the leader solves a model predictive control (MPC) problem with its known set of obstacles and plans a feasible trajectory to complete the task. The follower estimates the inputs of the leader and uses a policy to assist the leader while reacting to obstacles in its proximity. The leader infers obstacles in the follower's vicinity by using the difference between the predicted and the real-time estimated follower control action. A method to switch the leader-follower roles is used to improve the control performance in tight environments. The efficacy of our approach is demonstrated with detailed comparisons to two alternative strategies, where it achieves the highest success rate, while completing the task fastest.