 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDatasets and Evaluation for Simultaneous Localization and Mapping Related Problems: A Comprehensive Survey
Paper and Code
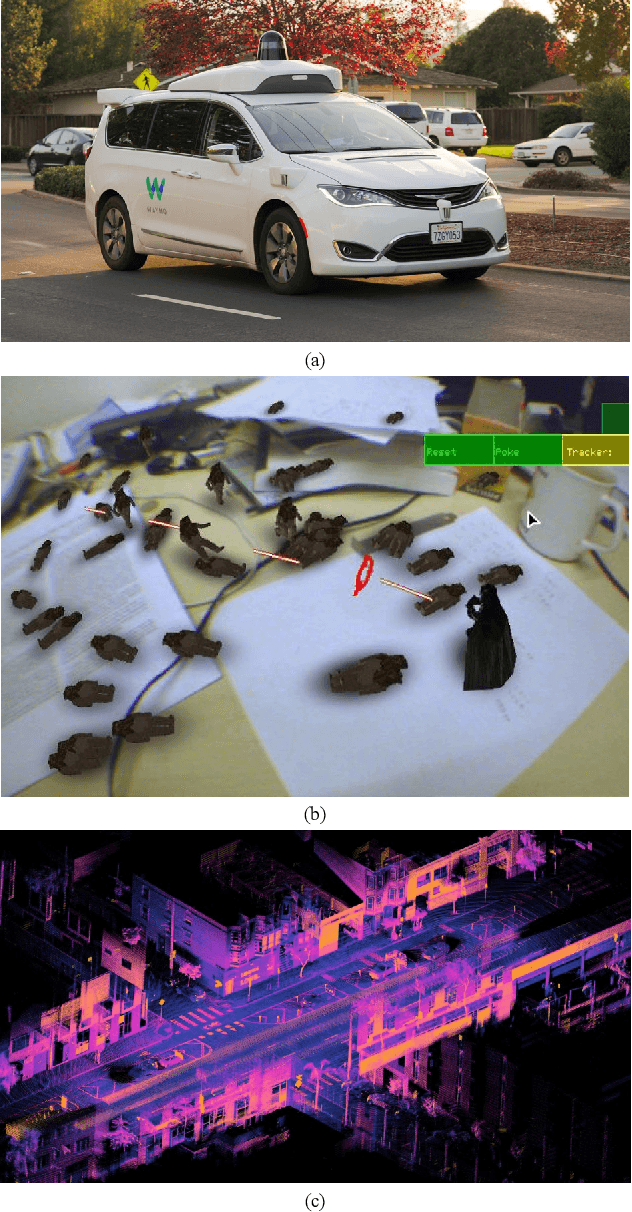
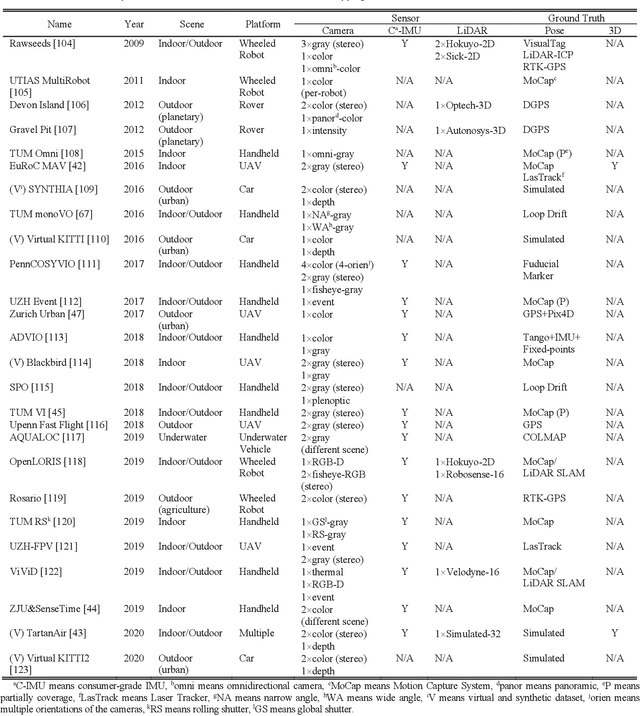
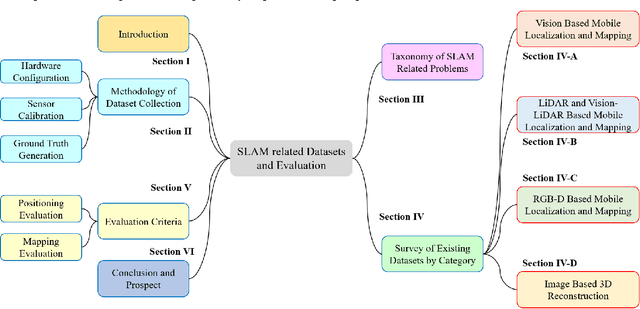
Simultaneous Localization and Mapping (SLAM) has found an increasing utilization lately, such as self-driving cars, robot navigation, 3D mapping, virtual reality (VR) and augmented reality (AR), etc., empowering both industry and daily life. Although the state-of-the-art algorithms where developers have spared no effort are source of intelligence, it is the datasets that dedicate behind and raise us higher. The employment of datasets is essentially a kind of simulation but profits many aspects - capacity of drilling algorithm hourly, exemption of costly hardware and ground truth system, and equitable benchmark for evaluation. However, as a branch of great significance, still the datasets have not drawn wide attention nor been reviewed thoroughly. Hence in this article, we strive to give a comprehensive and open access review of SLAM related datasets and evaluation, which are scarcely surveyed while highly demanded by researchers and engineers, looking forward to serving as not only a dictionary but also a development proposal. The paper starts with the methodology of dataset collection, and a taxonomy of SLAM related tasks. Then followed with the main portion - comprehensively survey the existing SLAM related datasets by category with our considerate introductions and insights. Furthermore, we talk about the evaluation criteria, which are necessary to quantify the algorithm performance on the dataset and inspect the defects. At the end, we summarize the weakness of datasets and evaluation - which could well result in the weakness of topical algorithms - to promote bridging the gap fundamentally.