 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA self-supervised learning-based 6-DOF grasp planning method for manipulator
Paper and Code
Jan 30, 2021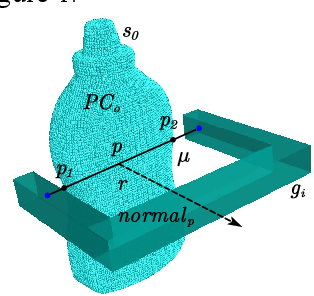
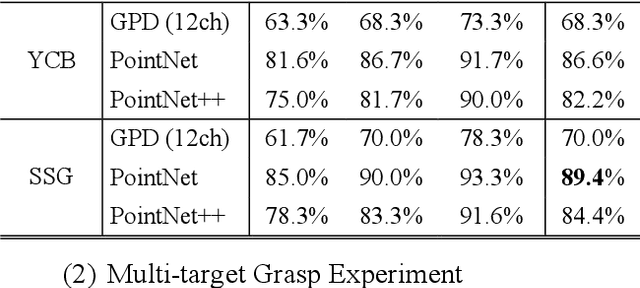
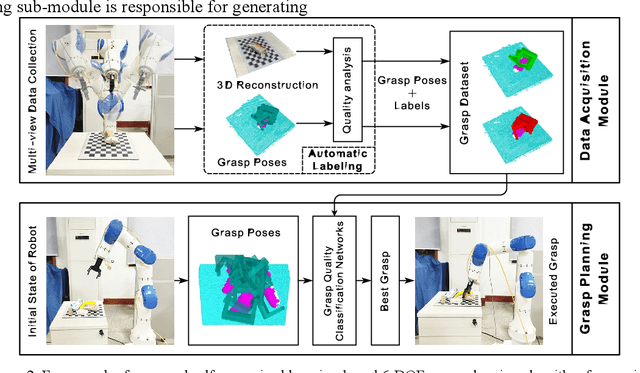
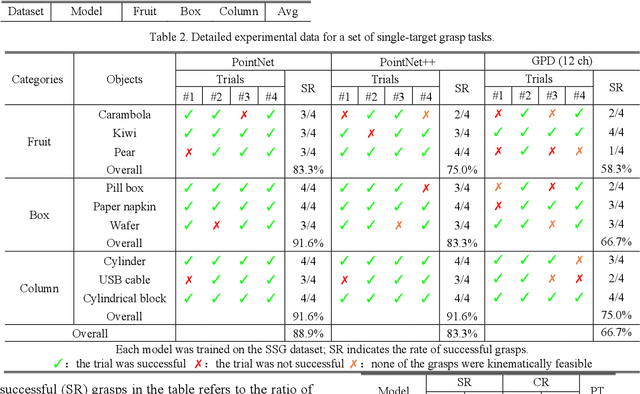
To realize a robust robotic grasping system for unknown objects in an unstructured environment, large amounts of grasp data and 3D model data for the object are required, the sizes of which directly affect the rate of successful grasps. To reduce the time cost of data acquisition and labeling and increase the rate of successful grasps, we developed a self-supervised learning mechanism to control grasp tasks performed by manipulators. First, a manipulator automatically collects the point cloud for the objects from multiple perspectives to increase the efficiency of data acquisition. The complete point cloud for the objects is obtained by utilizing the hand-eye vision of the manipulator, and the TSDF algorithm. Then, the point cloud data for the objects is used to generate a series of six-degrees-of-freedom grasp poses, and the force-closure decision algorithm is used to add the grasp quality label to each grasp pose to realize the automatic labeling of grasp data. Finally, the point cloud in the gripper closing area corresponding to each grasp pose is obtained; it is then used to train the grasp-quality classification model for the manipulator. The results of data acquisition experiments demonstrate that the proposed method allows high-quality data to be obtained. The simulated results prove the effectiveness of the proposed grasp-data acquisition method. The results of performing actual grasping experiments demonstrate that the proposed self-supervised learning method can increase the rate of successful grasps for the manipulator.