 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction by Anticipation: An Action-Conditional Prediction Method based on Interaction Learning
Paper and Code
Dec 25, 2020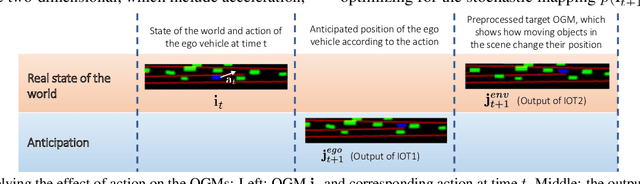

In autonomous driving (AD), accurately predicting changes in the environment can effectively improve safety and comfort. Due to complex interactions among traffic participants, however, it is very hard to achieve accurate prediction for a long horizon. To address this challenge, we propose prediction by anticipation, which views interaction in terms of a latent probabilistic generative process wherein some vehicles move partly in response to the anticipated motion of other vehicles. Under this view, consecutive data frames can be factorized into sequential samples from an action-conditional distribution that effectively generalizes to a wider range of actions and driving situations. Our proposed prediction model, variational Bayesian in nature, is trained to maximize the evidence lower bound (ELBO) of the log-likelihood of this conditional distribution. Evaluations of our approach with prominent AD datasets NGSIM I-80 and Argoverse show significant improvement over current state-of-the-art in both accuracy and generalization.