 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQoS Aware Robot Trajectory Optimization with IRS-Assisted Millimeter-Wave Communications
Paper and Code
Dec 19, 2020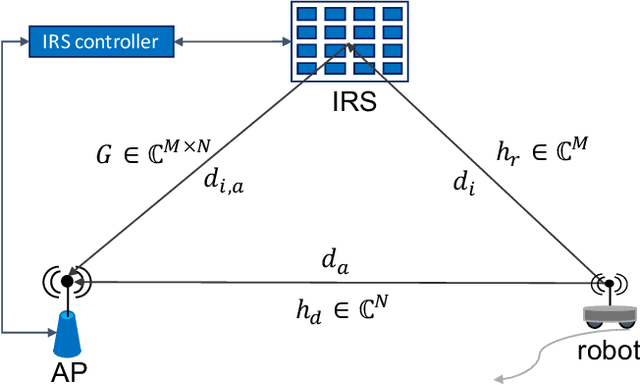
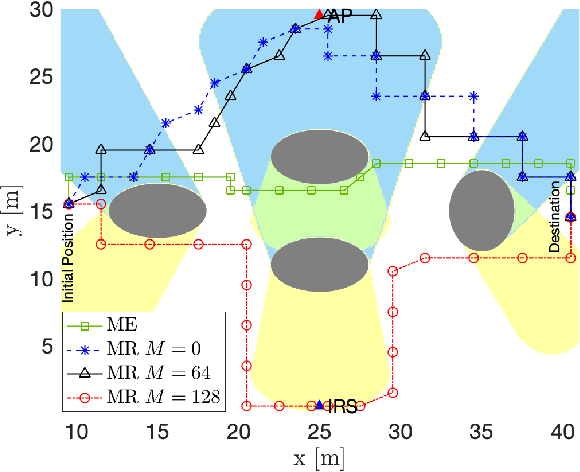
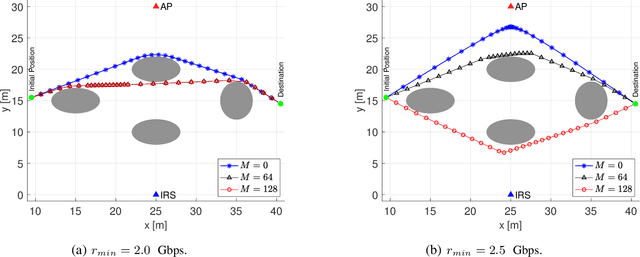
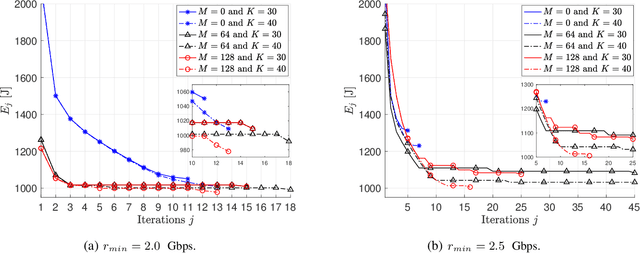
This paper considers the motion energy minimization problem for a wirelessly connected robot using millimeter-wave (mm-wave) communications. These are assisted by an intelligent reflective surface (IRS) that enhances the coverage at such high frequencies characterized by high blockage sensitivity. The robot is subject to time and uplink communication quality of service (QoS) constraints. This is a fundamental problem in fully automated factories that characterize Industry 4.0, where robots may have to perform tasks with given deadlines while maximizing the battery autonomy and communication efficiency. To account for the mutual dependence between robot position and communication QoS, we propose a joint optimization of robot trajectory and beamforming at the IRS and access point (AP). We present a solution that first exploits mm-wave channel characteristics to decouple beamforming and trajectory optimization. Then, the latter is solved by a successive-convex optimization-based algorithm. The algorithm takes into account the obstacles' positions and a radio map to avoid collisions and poorly covered areas. We prove that the algorithm can converge to a solution satisfying the Karush-Kuhn-Tucker (KKT) conditions. The simulation results show a dramatic reduction of the motion energy consumption with respect to methods that aim to find maximum-rate trajectories. Moreover, we show how the IRS and the beamforming optimization improve the motion energy efficiency of the robot.