Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Time Postponing Motion Planning for Combinatorial Uncertain Maneuvering
Paper and Code
Dec 13, 2020
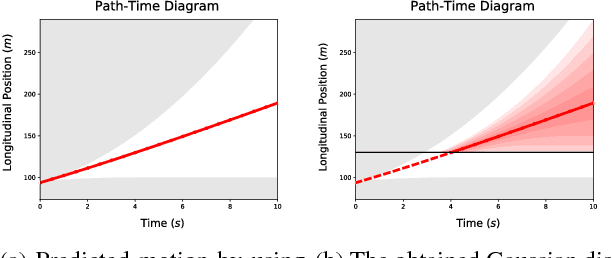
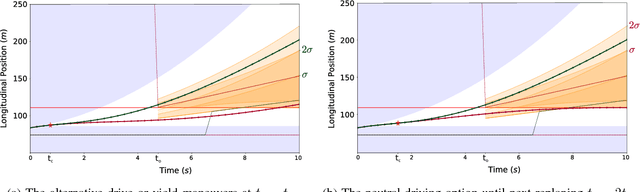
Motion planning involves decision making among combinatorial maneuver variants in urban driving. A planner must consider uncertainties and associated risks of the maneuver variants, and subsequently select a maneuver alternative. In this paper we present a planning approach that considers the uncertainties in the prediction and, in case of high uncertainty, postpones the combinatorial decision making to a later time within the planning horizon. With our proposed approach, safe but at the same time not overconservative motion is planned.
* 2018 21st International Conference on Intelligent Transportation
Systems (ITSC) * 7 pages, 5 figures
View paper on