 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLARM: Simultaneous Localization and Radio Mapping for Communication-aware Connected Robot
Paper and Code
Nov 18, 2020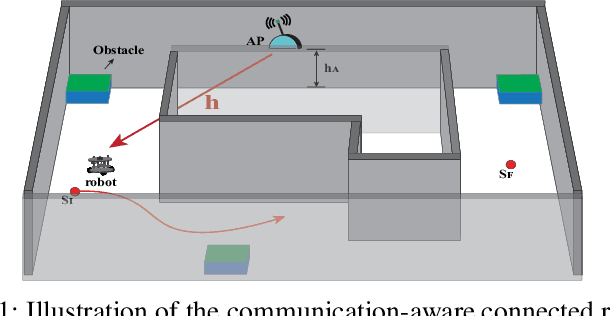
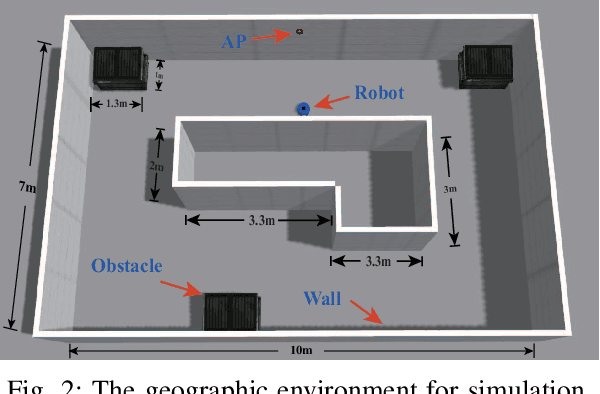
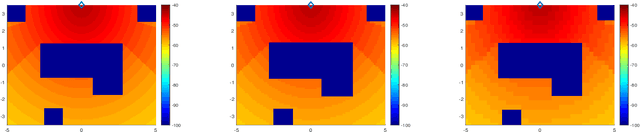
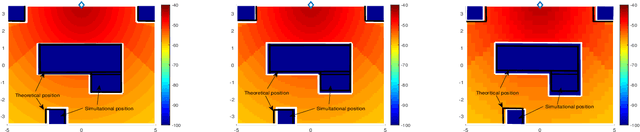
A novel simultaneous localization and radio mapping (SLARM) framework for communication-aware connected robots in the unknown indoor environment is proposed, where the simultaneous localization and mapping (SLAM) algorithm and the global geographic map recovery (GGMR) algorithm are leveraged to simultaneously construct a geographic map and a radio map named a channel power gain map. Specifically, the geographic map contains the information of a precise layout of obstacles and passable regions, and the radio map characterizes the position-dependent maximum expected channel power gain between the access point and the connected robot. Numerical results show that: 1) The pre-defined resolution in the SLAM algorithm and the proposed GGMR algorithm significantly affect the accuracy of the constructed radio map; and 2) The accuracy of radio map constructed by the SLARM framework is more than 78.78% when the resolution value smaller than 0.15m, and the accuracy reaches 91.95% when the resolution value is pre-defined as 0.05m.