 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidar-based exploration and discretization for mobile robot planning
Paper and Code
Nov 19, 2020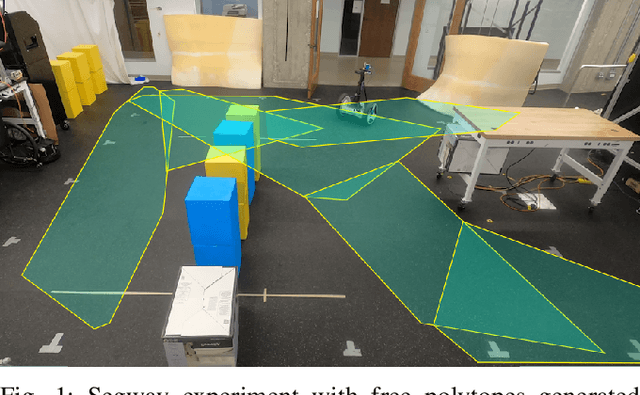
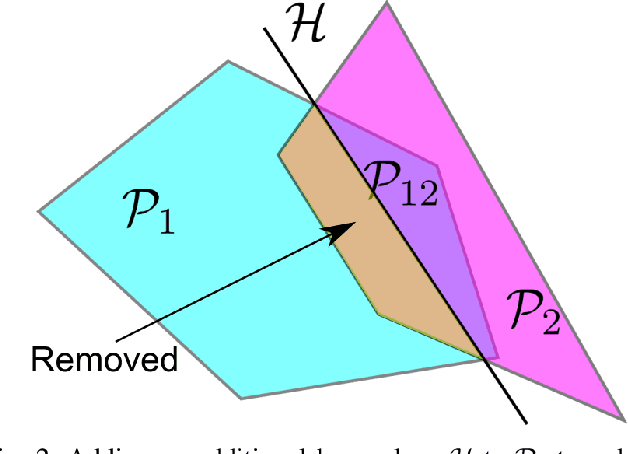
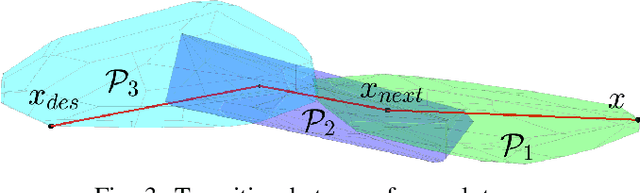
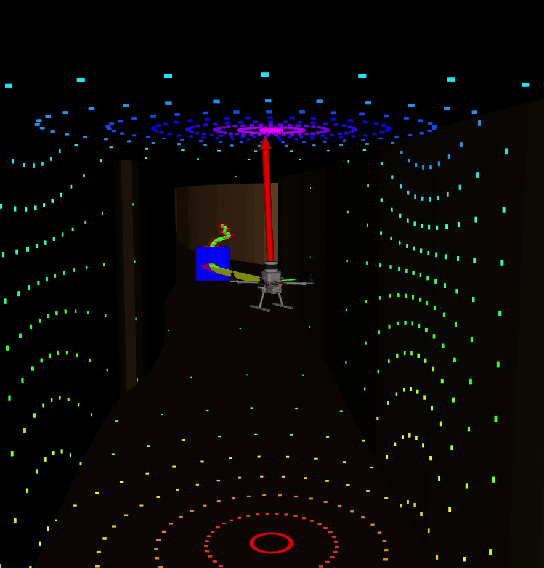
In robotic applications, the control, and actuation deal with a continuous description of the system and environment, while high-level planning usually works with a discrete description. This paper considers the problem of bridging the low-level control and high-level planning for robotic systems via sensor data. In particular, we propose a discretization algorithm that identifies free polytopes via lidar point cloud data. A transition graph is then constructed where each node corresponds to a free polytope and two nodes are connected with an edge if the two corresponding free polytopes intersect. Furthermore, a distance measure is associated with each edge, which allows for the assessment of quality (or cost) of the transition for high-level planning. For the low-level control, the free polytopes act as a convenient encoding of the environment and allow for the planning of collision-free trajectories that realizes the high-level plan. The results are demonstrated in high-fidelity ROS simulations and experiments with a drone and a Segway.