 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved Visual-Inertial Localization for Low-cost Rescue Robots
Paper and Code
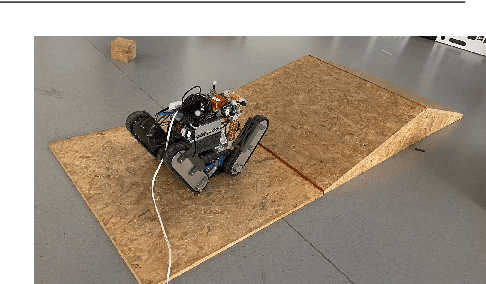
This paper improves visual-inertial systems to boost the localization accuracy for low-cost rescue robots. When robots traverse on rugged terrain, the performance of pose estimation suffers from big noise on the measurements of the inertial sensors due to ground contact forces, especially for low-cost sensors. Therefore, we propose \textit{Threshold}-based and \textit{Dynamic Time Warping}-based methods to detect abnormal measurements and mitigate such faults. The two methods are embedded into the popular VINS-Mono system to evaluate their performance. Experiments are performed on simulation and real robot data, which show that both methods increase the pose estimation accuracy. Moreover, the \textit{Threshold}-based method performs better when the noise is small and the \textit{Dynamic Time Warping}-based one shows greater potential on large noise.