 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Sampling and Trajectory Optimization over Graphs for Online Motion Planning
Paper and Code
Nov 13, 2020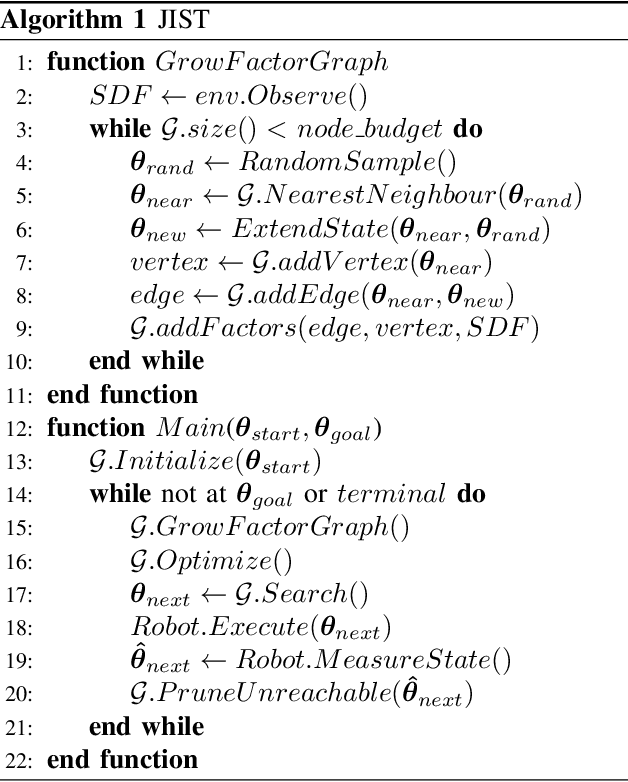
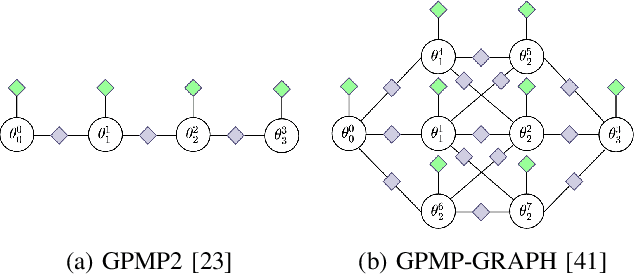
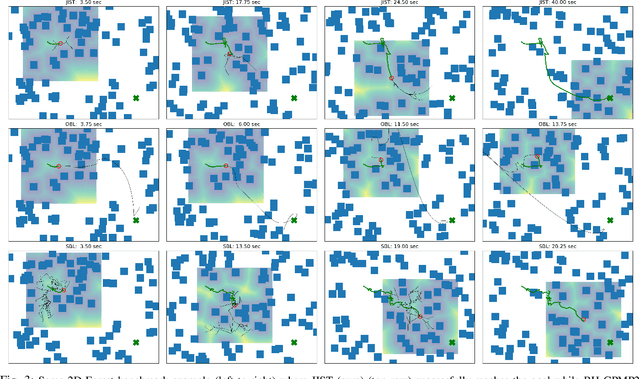
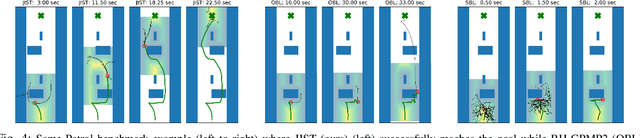
Among the most prevailing motion planning techniques, sampling and trajectory optimization have emerged successful due to their ability to handle tight constraints and high-dimensional systems respectively. However, limitations in sampling in higher dimensions and local minima issues in optimization have hindered their ability to excel beyond static scenes in offline settings. Here we consider highly dynamic environments with long horizons that necessitate a fast online solution. We present a unified approach that leverages the complementary strengths of sampling and optimization, and interleaves them both in a manner that is well suited to this challenging problem. With benchmarks in multiple synthetic and realistic simulated environments, we show our approach is significantly better in performance on various metrics against baselines that only either employ sampling or optimization. Supplementary video: https://youtu.be/lfzZ6Vfzjvg