 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMicron-level Optimal Obstacle-avoidance Trajectory Planning for a Free-floating Space Robot with Predefined-time Convergence
Paper and Code
Nov 09, 2020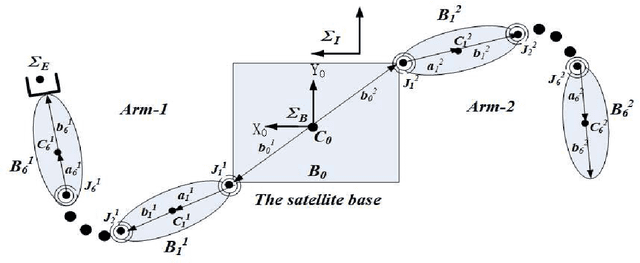
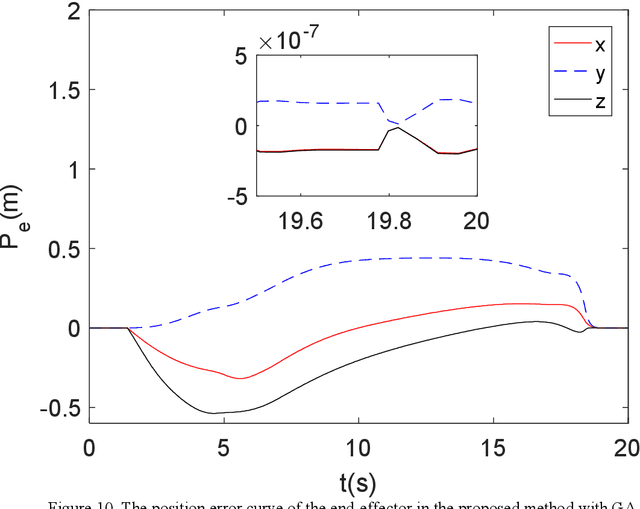
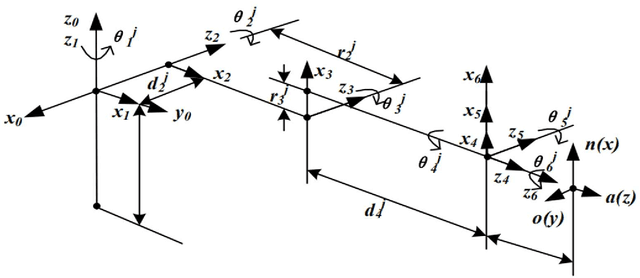
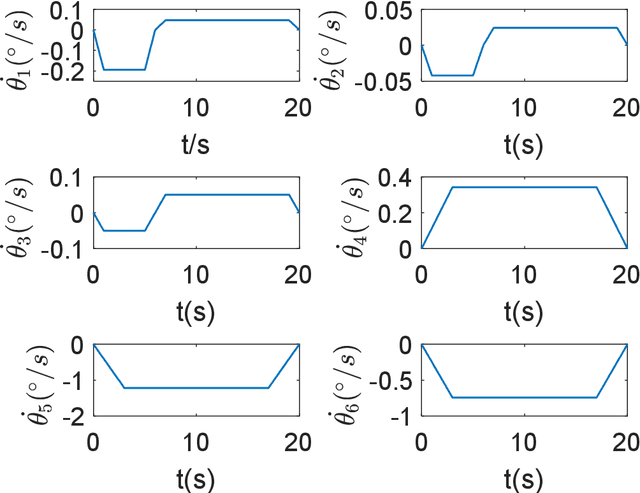
With the development of human space exploration, the space environment is gradually filled with abandoned satellite debris and unknown micrometeorites, which will seriously affect capture motion of space robot. Hence, a novel fast collision-avoidance trajectory planning strategy for a dual-arm free-floating space robot (FFSR) with predefined-time pose feedback will be mainly studied to achieve micron-level tracking accuracy of end-effector in this paper. However, similar to control, the exponential feedback results in larger initial joint angular velocity relative to proportional feedback. Therefore, a GA-based optimization algorithm is used to reduce the control input, which is just the joint angular velocity. Firstly, a pose-error-based kinematic model of the FFSR will be derived from a control perspective. Then, a cumulative dangerous field (CDF) collision-avoidance algorithm is applied in predefined-time trajectory planning to achieve micron-level collision-avoidance trajectory tracking precision. In the end, a GA-based optimization algorithm is used to optimize the predefined-time parameter to obtain a motion trajectory of low joint angular velocity of robotic arms. The simulation results verify our conjecture and conclusion.