 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Model Control for Wheel-legged Robotic Systems with Prescribed Transient Performance
Paper and Code
Nov 09, 2020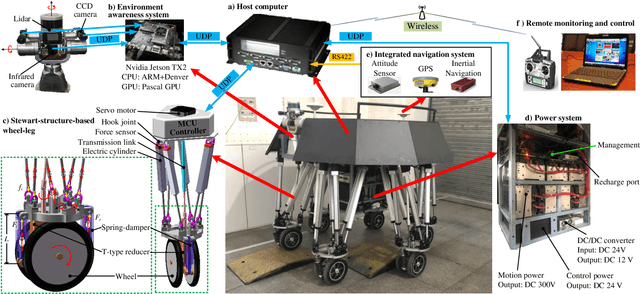
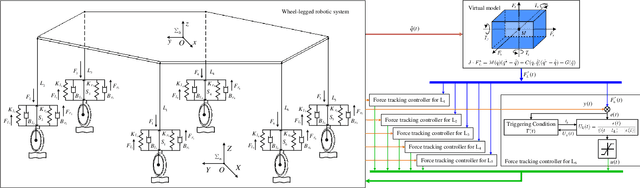
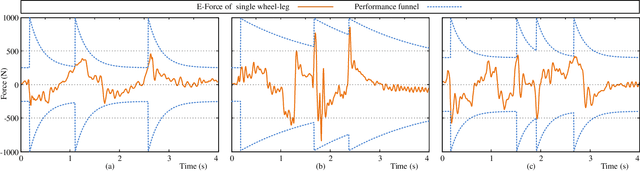
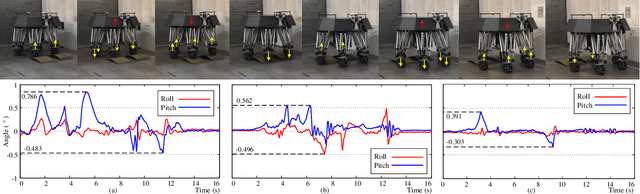
This work proposes a posture adjustment strategy for wheel-legged mechanisms via virtual model control with prescribed transient performance. A simple model of a rigid block subjected to a 6-dimensional force at the center of gravity (CoG) is introduced to be the virtual model of the wheel-legged control system. The force tracking of the wheel-legs is realized with prescribed transient performance based on the funnel control strategy. To improve the robustness of the scheme, an event-triggering condition is designed for on-line segment of the funnel function, such that the force tracking error evolves inside the performance funnel with proved convergence. The absence of Zeno behavior for the event-based mechanism is also guaranteed. With the force references of the wheel-legs are planned for the vector sum tracks the 6-dimensional force from the virtual model, the posture adjustment is achieved on uneven roads by the force tracking of wheel-legs. Experimental results are presented to validate the stability and effectiveness of the proposed method.