 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Modular Robotic Arm Control Stack for Research: Franka-Interface and FrankaPy
Paper and Code
Nov 04, 2020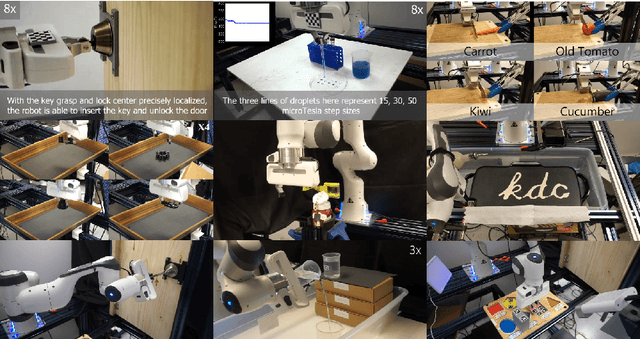
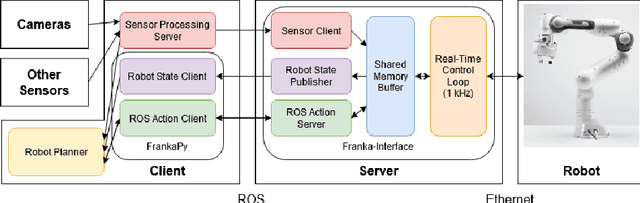

We designed a modular robotic control stack that provides a customizable and accessible interface to the Franka Emika Panda Research robot. This framework abstracts high-level robot control commands as skills, which are decomposed into combinations of trajectory generators, feedback controllers, and termination handlers. Low-level control is implemented in C++ and runs at $1$kHz, and high-level commands are exposed in Python. In addition, external sensor feedback, like estimated object poses, can be streamed to the low-level controllers in real time. This modular approach allows us to quickly prototype new control methods, which is essential for research applications. We have applied this framework across a variety of real-world robot tasks in more than $5$ published research papers. The framework is currently shared internally with other robotics labs at Carnegie Mellon University, and we plan for a public release in the near future.