 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Multi-Agent Coordination for Enhancing Target Coverage in Directional Sensor Networks
Paper and Code
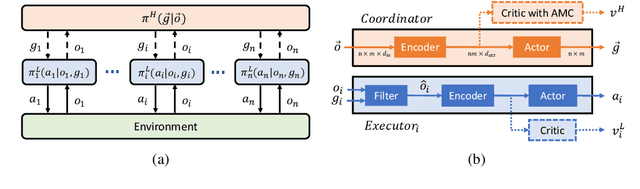
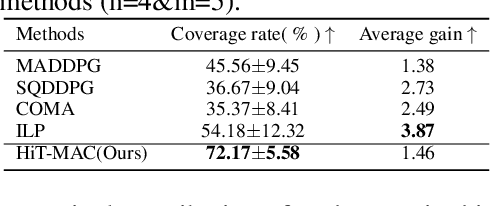

Maximum target coverage by adjusting the orientation of distributed sensors is an important problem in directional sensor networks (DSNs). This problem is challenging as the targets usually move randomly but the coverage range of sensors is limited in angle and distance. Thus, it is required to coordinate sensors to get ideal target coverage with low power consumption, e.g. no missing targets or reducing redundant coverage. To realize this, we propose a Hierarchical Target-oriented Multi-Agent Coordination (HiT-MAC), which decomposes the target coverage problem into two-level tasks: targets assignment by a coordinator and tracking assigned targets by executors. Specifically, the coordinator periodically monitors the environment globally and allocates targets to each executor. In turn, the executor only needs to track its assigned targets. To effectively learn the HiT-MAC by reinforcement learning, we further introduce a bunch of practical methods, including a self-attention module, marginal contribution approximation for the coordinator, goal-conditional observation filter for the executor, etc. Empirical results demonstrate the advantage of HiT-MAC in coverage rate, learning efficiency,and scalability, comparing to baselines. We also conduct an ablative analysis on the effectiveness of the introduced components in the framework.