 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive and Interactive Mapping with Dynamic Gaussian ProcessImplicit Surfaces for Mobile Manipulators
Paper and Code
Oct 25, 2020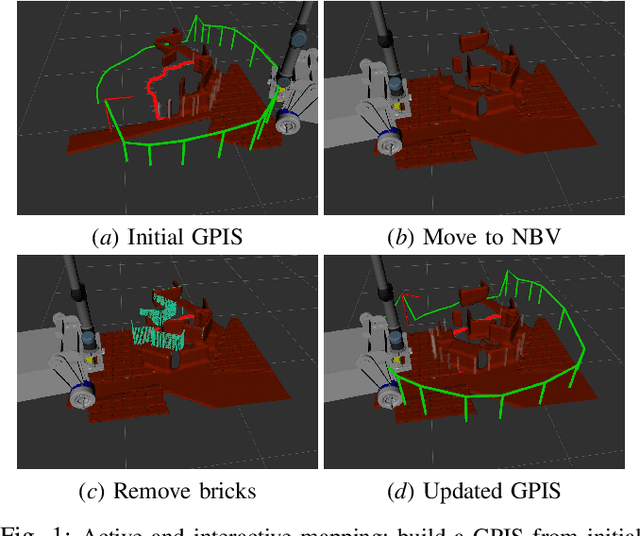
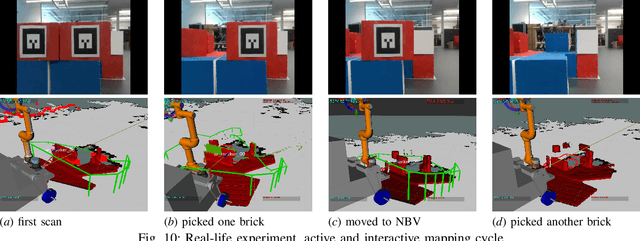
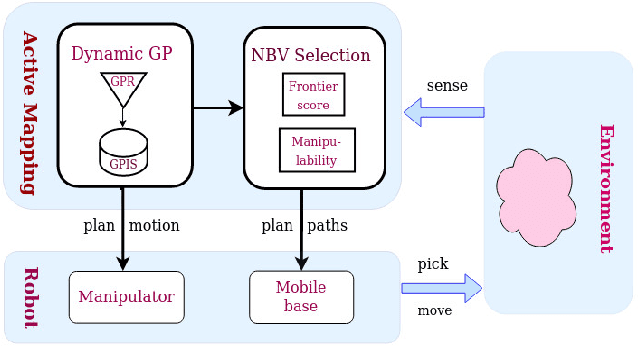
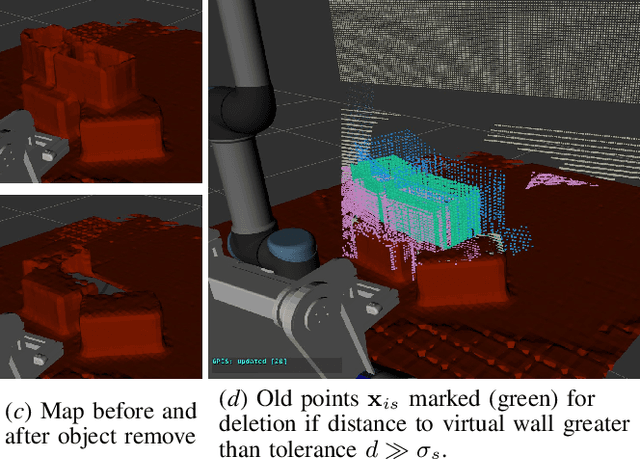
In this paper, we present an interactive probabilistic framework for a mobile manipulator which moves in the environment, makes changes and maps the changing scene alongside. The framework is motivated by interactive robotic applications found in warehouses, construction sites and additive manufacturing, where a mobile robot manipulates objects in the scene. The proposed framework uses a novel dynamic Gaussian Process (GP) Implicit Surface method to incrementally build and update the scene map that reflects environment changes. Actively the framework provides the next-best-view (NBV), balancing the need of pick object reach-ability and map's information gain (IG). To enforce a priority of visiting boundary segments over unknown regions, the IG formulation includes an uncertainty gradient based frontier score by exploiting the GP kernel derivative. This leads to an efficient strategy that addresses the often conflicting requirement of unknown environment exploration and object picking exploitation given a limited execution horizon. We demonstrate the effectiveness of our framework with software simulation and real-life experiments.