 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRigidFusion: Robot Localisation and Mapping in Environments with Large Dynamic Rigid Objects
Paper and Code
Oct 21, 2020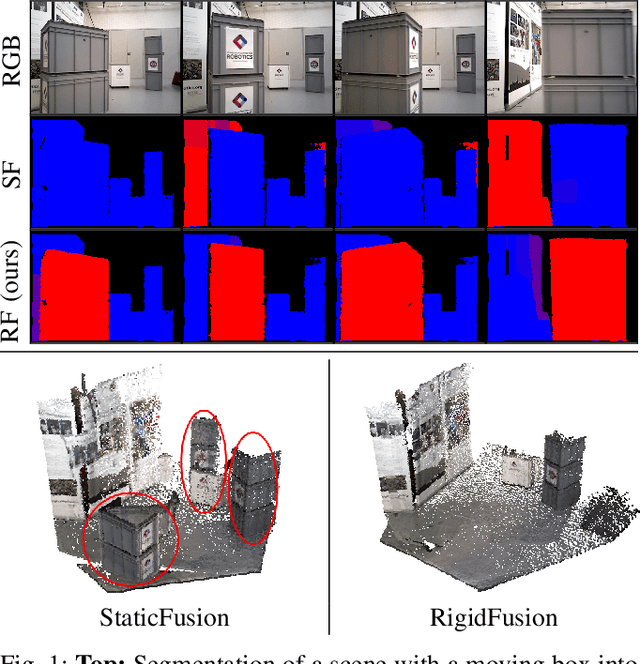
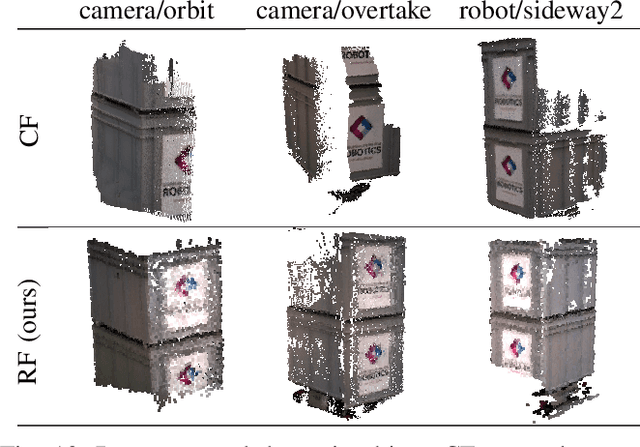
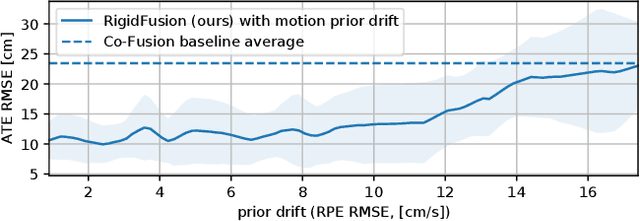
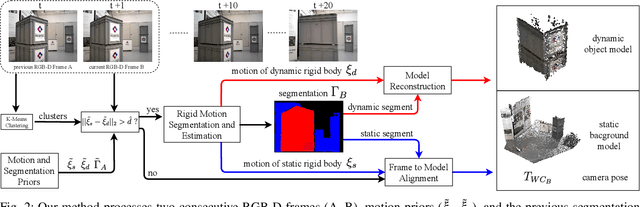
This work presents a novel approach to simultaneously track a robot with respect to multiple rigid entities, including the environment and additional dynamic objects in a scene. Previous approaches treat dynamic parts of a scene as outliers and are thus limited to small amount of dynamics, or rely on prior information for all objects in the scene to enable robust camera tracking. Here, we propose to formulate localisation and object tracking as the same underlying problem and simultaneously track multiple rigid transformations, therefore enabling simultaneous localisation and object tracking for mobile manipulators in dynamic scenes. We evaluate our approach on multiple challenging dynamic scenes with large occlusions. The evaluation demonstrates that our approach achieves better scene segmentation and camera pose tracking in highly dynamic scenes without requiring knowledge of the dynamic object's appearance.