 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Robotic Object Search via HIEM: Hierarchical Policy Learning with Intrinsic-Extrinsic Modeling
Paper and Code
Oct 16, 2020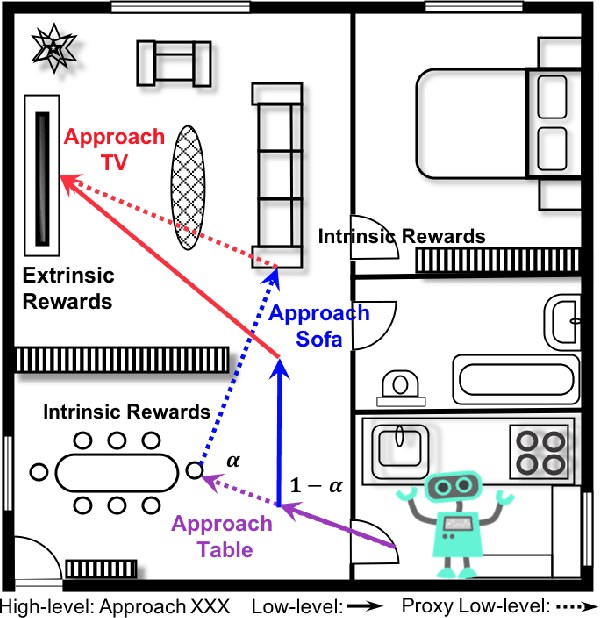
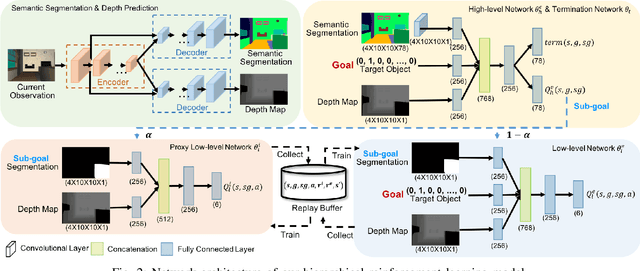
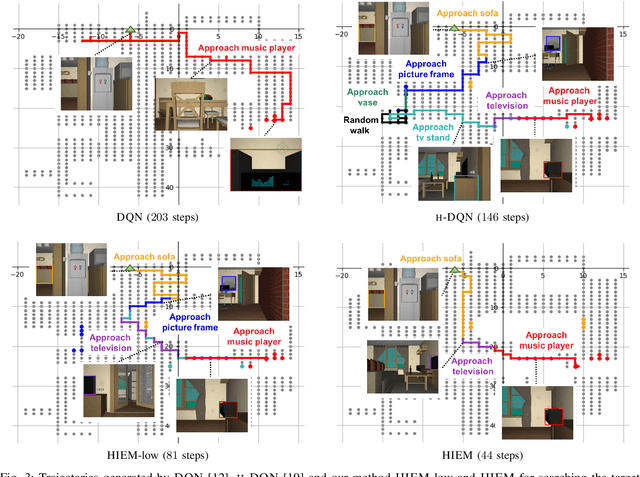
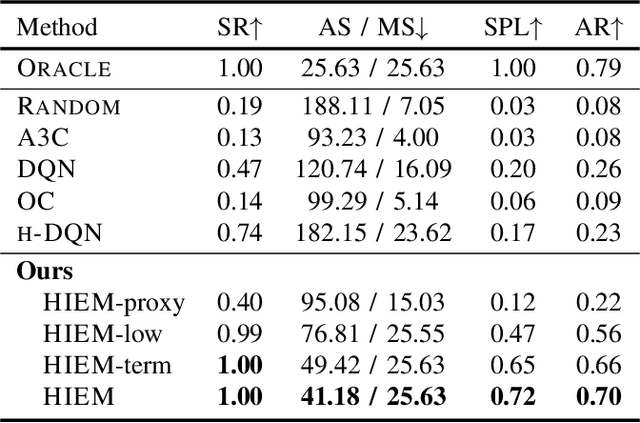
Despite the significant success at enabling robots with autonomous behaviors makes deep reinforcement learning a promising approach for robotic object search task, the deep reinforcement learning approach severely suffers from the nature sparse reward setting of the task. To tackle this challenge, we present a novel policy learning paradigm for the object search task, based on hierarchical and interpretable modeling with an intrinsic-extrinsic reward setting. More specifically, we explore the environment efficiently through a proxy low-level policy which is driven by the intrinsic rewarding sub-goals. We further learn our hierarchical policy from the efficient exploration experience where we optimize both of our high-level and low-level policies towards the extrinsic rewarding goal to perform the object search task well. Experiments conducted on the House3D environment validate and show that the robot, trained with our model, can perform the object search task in a more optimal and interpretable way.